Page Not Found
Sorry, but the page you were trying to view does not exist — perhaps you can try searching for it below.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Sorry, but the page you were trying to view does not exist — perhaps you can try searching for it below.
Shaping the Future of Mobility with Human-Centered AI
For over 15 years, I have turned idea concepts into production-ready intelligent systems at Intel and BMW. As a research professor, I am now pioneering the next wave of human-centric AI to build a safer, more intelligent mobility future. This site is an exploration of that journey at the intersection of AI, automotive, and user experience.
Prof. Dr. Alvarez

A variety of common markup showing how the theme styles them.
Single line blockquote:
Quotes are cool.
| Entry | Item | |
|---|---|---|
| John Doe | 2016 | Description of the item in the list |
| Jane Doe | 2019 | Description of the item in the list |
| Doe Doe | 2022 | Description of the item in the list |
| Header1 | Header2 | Header3 |
|---|---|---|
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| Foot1 | Foot2 | Foot3 |
Make any link standout more when applying the .btn class.
Watch out! You can also add notices by appending {: .notice} to a paragraph.
This is an example of a link.
The abbreviation CSS stands for “Cascading Style Sheets”.
“Code is poetry.” —Automattic
You will learn later on in these tests that word-wrap: break-word; will be your best friend.
This tag will let you strikeout text.
The emphasize tag should italicize text.
This tag should denote inserted text.
This scarcely known tag emulates keyboard text, which is usually styled like the <code> tag.
This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
Developers, developers, developers…
–Steve Ballmer
This tag shows bold text.
Getting our science styling on with H2O, which should push the “2” down.
Still sticking with science and Isaac Newton’s E = MC2, which should lift the 2 up.
This allows you to denote variables.
Sorry, but the page you were trying to view does not exist — perhaps you can try searching for it below.
Shaping the Future of Mobility with Human-Centered AI
For over 15 years, I have turned idea concepts into production-ready intelligent systems at Intel and BMW. As a research professor, I am now pioneering the next wave of human-centric AI to build a safer, more intelligent mobility future. This site is an exploration of that journey at the intersection of AI, automotive, and user experience.
Prof. Dr. Alvarez
` tag. ### Preformatted Tag This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
### Quote Tag Developers, developers, developers…
–Steve Ballmer ### Strong Tag This tag shows **bold text**. ### Subscript Tag Getting our science styling on with H2O, which should push the "2" down. ### Superscript Tag Still sticking with science and Isaac Newton's E = MC2, which should lift the 2 up. ### Variable Tag This allows you to denote variables. {% include base_path %} {% for post in site.pages %} {% include archive-single.html %} {% endfor %} </article> </div> Posts by Category
{% include base_path %} {% include group-by-array collection=site.posts field="categories" %} {% for category in group_names %} {% assign posts = group_items[forloop.index0] %}{{ category }}
{% for post in posts %} {% include archive-single.html %} {% endfor %} {% endfor %} Posts by Collection
{% include base_path %} {% capture written_label %}'None'{% endcapture %} {% for collection in site.collections %} {% unless collection.output == false or collection.label == "posts" %} {% capture label %}{{ collection.label }}{% endcapture %} {% if label != written_label %}{{ label }}
{% capture written_label %}{{ label }}{% endcapture %} {% endif %} {% endunless %} {% for post in collection.docs %} {% unless collection.output == false or collection.label == "posts" %} {% include archive-single.html %} {% endunless %} {% endfor %} {% endfor %} CV
{% include base_path %} Education ====== * 2012 International Ph.D in Computer Science, University of the Basque Country & Clemson University * Supervisors: Karmele Lopez Ipina & Juan E. Gilbert * Graduated Summa Cum Laude * 2011 Advance Graduate Research in Engineering, University of Burgos * Graduated Summa Cum Laude * 2006 B.S. in Communication Sciences, University of Burgos * Graduated Summa Cum Laude Work experience ====== * 01/2025 - Present: Profesor of Human-centered Intelligent Systems * THI, Computer Science Faculty, AI Motion Institute * 12/2021 - Present: Principal Engineer, Technical Assistant to Intel Labs Director * Intel Corporation, Intel Labs, Autonomous Driving Research * 09/2014 - 12/2021: Sr. Research Scientist * Intel Corporation, Intel Labs, Autonomous Driving Research * 11/2013 - 09/2014 : Sr. Manager, IT Projects * BMW China * 12/2012 - 11/2013 : Manager, Connected Drive Asia Pacific * BMW China * 02/2012 - 12/2012 : IT Architect * BMW AG * 09/2009 - 02/2012 : Research Associate * BMW USA, Greenville, SC * 09/2009 - 02/2012 : Graudate Research Assistant * Clemson University, School of Computing Skills ====== * Research * Automotive * Automated Driving * Advance Driving Assistance Systems * Safety * Perception * Planning * Connected Vehicles - V2X * Human Factors * Human-Machine Interactions * Driving Monitoring Systems * Technical * Programming * Data Analytics * Product Development * Prototyping * Problem Solving * Languages * Spanish - Native * English / German - Fluent * Chinese - Basic Publications ======{% for post in site.publications %} {% include archive-single-cv.html %} {% endfor %}
Talks ======{% for post in site.talks %} {% include archive-single-talk-cv.html %} {% endfor %}
Teaching ======{% for post in site.teaching %} {% include archive-single-cv.html %} {% endfor %}
Service and leadership ====== * IEEE Sr. Member * ACM Member * IJHCI - Board Member * AutoUI - SC Member * IEEE ITSS - Member
/* * Minimal Mistakes Jekyll Theme * * - Michael Rose * - mademistakes.com * - https://twitter.com/mmistakes * */ @import "vendor/breakpoint/breakpoint"; // media query mixins @import "variables"; @import "mixins"; @import "vendor/susy/susy"; @import "reset"; @import "base"; @import "utilities"; @import "animations"; @import "tables"; @import "buttons"; @import "citations"; @import "notices"; @import "masthead"; @import "navigation"; @import "footer"; @import "syntax"; @import "forms"; @import "page"; @import "archive"; @import "sidebar"; @import "vendor/font-awesome/fontawesome"; @import "vendor/font-awesome/solid"; @import "vendor/font-awesome/brands"; @import "vendor/magnific-popup/magnific-popup"; @import "print"; @import "dark-theme"; Markdown
## Locations of key files/directories * Basic config options: _config.yml * Top navigation bar config: _data/navigation.yml * Single pages: _pages/ * Collections of pages are .md or .html files in: * _publications/ * _portfolio/ * _posts/ * _teaching/ * _talks/ * Footer: _includes/footer.html * Static files (like PDFs): /files/ * Profile image (can set in _config.yml): images/profile.png ## Tips and hints * Name a file ".md" to have it render in markdown, name it ".html" to render in HTML. * Go to the [commit list](https://github.com/academicpages/academicpages.github.io/commits/master) (on your repo) to find the last version Github built with Jekyll. * Green check: successful build * Orange circle: building * Red X: error * No icon: not built ## Resources * [Liquid syntax guide](https://shopify.github.io/liquid/tags/control-flow/) ## Markdown guide ### Header three #### Header four ##### Header five ###### Header six ## Blockquotes Single line blockquote: > Quotes are cool. ## Tables ### Table 1 | Entry | Item | | | -------- | ------ | ------------------------------------------------------------ | | [John Doe](#) | 2016 | Description of the item in the list | | [Jane Doe](#) | 2019 | Description of the item in the list | | [Doe Doe](#) | 2022 | Description of the item in the list | ### Table 2 | Header1 | Header2 | Header3 | |:--------|:-------:|--------:| | cell1 | cell2 | cell3 | | cell4 | cell5 | cell6 | |-----------------------------| | cell1 | cell2 | cell3 | | cell4 | cell5 | cell6 | |=============================| | Foot1 | Foot2 | Foot3 | ## Definition Lists Definition List Title : Definition list division. Startup : A startup company or startup is a company or temporary organization designed to search for a repeatable and scalable business model. #dowork : Coined by Rob Dyrdek and his personal body guard Christopher "Big Black" Boykins, "Do Work" works as a self motivator, to motivating your friends. Do It Live : I'll let Bill O'Reilly [explain](https://www.youtube.com/watch?v=O_HyZ5aW76c "We'll Do It Live") this one. ## Unordered Lists (Nested) * List item one * List item one * List item one * List item two * List item three * List item four * List item two * List item three * List item four * List item two * List item three * List item four ## Ordered List (Nested) 1. List item one 1. List item one 1. List item one 2. List item two 3. List item three 4. List item four 2. List item two 3. List item three 4. List item four 2. List item two 3. List item three 4. List item four ## Buttons Make any link standout more when applying the `.btn` class. ## Notices **Watch out!** You can also add notices by appending `{: .notice}` to a paragraph. {: .notice} ## HTML Tags ### Address Tag 1 Infinite Loop
Cupertino, CA 95014
United States### Anchor Tag (aka. Link) This is an example of a [link](http://github.com "Github"). ### Abbreviation Tag The abbreviation CSS stands for "Cascading Style Sheets". *[CSS]: Cascading Style Sheets ### Cite Tag "Code is poetry." ---Automattic ### Code Tag You will learn later on in these tests that `word-wrap: break-word;` will be your best friend. ### Strike Tag This tag will let you strikeout text. ### Emphasize Tag The emphasize tag should _italicize_ text. ### Insert Tag This tag should denote inserted text. ### Keyboard Tag This scarcely known tag emulates keyboard text, which is usually styled like the `` tag. ### Preformatted Tag This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
### Quote Tag Developers, developers, developers…
–Steve Ballmer ### Strong Tag This tag shows **bold text**. ### Subscript Tag Getting our science styling on with H2O, which should push the "2" down. ### Superscript Tag Still sticking with science and Isaac Newton's E = MC2, which should lift the 2 up. ### Variable Tag This allows you to denote variables. </article> </div> Page not in menu
This is a page not in the menu. You can use markdown in this page. Heading 1 ====== Heading 2 ====== Page Archive
{% include base_path %} {% for post in site.pages %} {% include archive-single.html %} {% endfor %} Patents
{% include base_path %} {% assign postsByYear = site.patents | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Portfolio
{% include base_path %} {% for post in site.portfolio %} {% include archive-single.html %} {% endfor %} Publications
{% if author.googlescholar %} You can also find my articles on my Google Scholar profile. {% endif %} {% include base_path %} {% assign postsByYear = site.publications | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Executive Portfolio
IGNACIO ALVAREZ
Technology Executive | Automotive & AI Leader
📍 Based in Germany · Open to Relocation Globally

Executive Summary
Technology Executive with a track record of CTO-level impact in the Automotive & AI sectors. Proven leader with 15+ years of experience architecting and scaling intelligent systems from R&D to series production, driving 30% YoY R&D ROI amidst budget reductions, leading global R&D organizations of 100+ engineers, and launching platforms adopted by 1M+ users. Expert in defining technical vision that aligns with C-suite objectives, secures market leadership, and generates massive IP value (150+ patents).
Core Competencies
Professional Experience
Tenured Research Professor of Human-centered Intelligent Systems
Technische Hochschule Ingolstadt
2025–Present

Challenge:
Establish and lead cutting-edge research initiatives in human-centered intelligent vehicles while securing substantial funding and building academic-industry partnerships.
Action:
Secured €3M grant from the High-Tech Agenda Program of the Government of Bavaria to develop comprehensive research programs in AI and Automotive. Established THI Doctoral School membership and developed advanced curriculum for Automotive AI Masters and User Experience Design programs.
Result:
Successfully positioned THI as a leading European research institution in AI and Automotive, with substantial funding secured and advanced educational programs established across Computer Science and Engineering faculties.
Principal Engineer & Executive Technical Advisor
Intel Corporation – Intel Labs
2021–2025

Challenge:
Maximize R&D value and strategic impact while managing 8% yearly budget reductions across Intel Labs' global engineering organization, requiring innovative approaches to resource optimization and strategic technology investments.
Action:
Established unified research strategies and cross-functional collaboration across Intel Labs' 500+ person global engineering organization. Steered autonomous driving R&D strategy aligning 100+ multi-regional engineering resources. Served as key technology advisor for M&A, divestiture, and IPO activities within the automotive sector.
Result:
Achieved average 30% YoY increase in R&D ROI, reversing the impact of budget cuts across semiconductor design, packaging, systems, networking, software, algorithmic development and AI. Successfully architected and deployed production-grade automated driving safety systems, reducing validation cycles by ~20% and accelerating compliance with emerging safety regulations.
Senior Research Scientist & Autonomous Driving Lead
Intel Corporation – Intel Labs
2014–2021
Challenge:
Develop and commercialize a comprehensive multimodal in-vehicle R&D platform that integrates cutting-edge technologies while establishing Intel as a leading automotive technology partner and securing substantial research funding.
Action:
Led cross-institutional research collaborations, securing $5M+ in funding and partnerships. Transferred multiple key technologies to Intel's and Mobileye product teams. Led open-source contributions to industry bodies and international standards, bridging research to real-world impact.
Result:
Successfully deployed "Skyline" platform across 10+ global automotive OEMs, showcased at international forums (Google IO, Intel 360). Secured 50+ granted patents and 100+ pending in autonomous systems, AI and robotics. Published 70+ papers and built thought leadership in automotive AI safety and HMI.
Senior IT Manager & Connected Drive Lead
BMW Group
2012–2014

Challenge:
Lead rapid expansion into Asia-Pacific's fastest-growing automotive market while ensuring 24/7 reliability and scalability of connected vehicle services during record growth, and differentiate BMW in a competitive luxury market through innovative in-car technology.
Action:
Managed 100+ IT engineering division across Asia-Pacific, overseeing data centers, telematics, and in-car digital services. Pioneered in-car voice and AI assistants, collaborating with partners like Nuance and Microsoft. Developed integrated multimodal user manual for BMW 7 series.
Result:
Achieved over 1 million new users in the first year, significantly enhancing customer engagement. Launched industry's first natural-language voice assistant and multimodal user manual, setting new standards for in-vehicle HMI and earning industry-wide commendations for innovation.
Advanced Research Roles
BMW IT Research Center and Clemson University, I-CAR
2009–2012
Challenge:
Develop cutting-edge automotive technology prototypes that can inform future product roadmaps while bridging academic research with commercial applications in the automotive industry.
Action:
Collaborated between BMW Technology Office USA and Clemson University to develop functional prototypes for location-based services, voice-activated navigation, augmented reality user manuals, and driver assistance systems.
Result:
Successfully created first proofs-of-concept that informed future BMW product roadmaps, establishing foundational technologies for connected vehicle services and advanced driver assistance systems.
Professional Leadership & Affiliations
 IEEE Intelligent Transportation Systems Society – Member of Board of Governors (elected role driving global ITS strategy)
IEEE Intelligent Transportation Systems Society – Member of Board of Governors (elected role driving global ITS strategy)  ACM AutomotiveUI Conference – Steering Committee Member (shaping annual agenda for automotive UX innovation)
ACM AutomotiveUI Conference – Steering Committee Member (shaping annual agenda for automotive UX innovation)  Editorial Boards – Board Member for IEEE ITS Magazine and Int. Journal of Human-Computer Interaction
Editorial Boards – Board Member for IEEE ITS Magazine and Int. Journal of Human-Computer Interaction  Senior Member, IEEE and Member, ACM, SAE (recognized professional standing and contributions in tech)
Senior Member, IEEE and Member, ACM, SAE (recognized professional standing and contributions in tech)Thought Leadership & Innovation
Patents
Holder of 150+ patents (50+ granted) in autonomous systems, AI, and robotics, shaping the core IP strategy for market-leading mobility solutions.
View Patent Portfolio Publications
Author of 70+ publications in top-tier IEEE and ACM venues and editor of multiple books on autonomous system engineering.
View Publications Industry Standards
Key contributor to the definition of global safety and communication standards for autonomous vehicles through leadership roles in IEEE and ETSI.
View Standards Work Education
Ph.D. in Computer Science (Automotive Intelligent Systems)
University of the Basque Country, Spain & Clemson University, USA, 2012
Summa Cum Laude
Joint international doctoral program focusing on conversational AI for vehicles.
M.Sc. in Media and Information Technology
Hochschule Offenburg, Germany, 2009
Coursework in multimedia systems and human-computer interaction.
B.Sc. in Communication Sciences
University of Burgos, Spain, 2006
Summa Cum Laude
Minor in Telecommunications.
Sitemap
{% include base_path %} A list of all the posts and pages found on the site. For you robots out there is an [XML version]({{ base_path }}/sitemap.xml) available for digesting as well.Pages
{% for post in site.pages %} {% include archive-single.html %} {% endfor %}Posts
{% for post in site.posts %} {% include archive-single.html %} {% endfor %} {% capture written_label %}'None'{% endcapture %} {% for collection in site.collections %} {% unless collection.output == false or collection.label == "posts" %} {% capture label %}{{ collection.label }}{% endcapture %} {% if label != written_label %}{{ label }}
{% capture written_label %}{{ label }}{% endcapture %} {% endif %} {% endunless %} {% for post in collection.docs %} {% unless collection.output == false or collection.label == "posts" %} {% include archive-single.html %} {% endunless %} {% endfor %} {% endfor %} Posts by Tags
{% include base_path %} {% include group-by-array collection=site.posts field="tags" %} {% for tag in group_names %} {% assign posts = group_items[forloop.index0] %}{{ tag }}
{% for post in posts %} {% include archive-single.html %} {% endfor %} {% endfor %} Talk map
This map is generated from a Jupyter Notebook file in /_talks/talkmap.ipynb, which mines the location fields in the .md files in _talks/.
Talks and presentations
{% if site.talkmap_link == true %}{% endif %} {% for post in site.talks reversed %} {% include archive-single-talk.html type='talk' %} {% endfor %} Talks
{% include base_path %} {% assign postsByYear = site.talks | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Teaching
{% include base_path %} {% for post in site.teaching reversed %} {% include archive-single.html %} {% endfor %} Teaching
{% include base_path %} {% assign postsByYear = site.teaching | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Terms and Privacy Policy
{% include base_path %} {% include toc %} ## Privacy Policy The privacy of my visitors is extremely important. This Privacy Policy outlines the types of personal information that is received and collected and how it is used. First and foremost, I will never share your email address or any other personal information to anyone without your direct consent. ### Log Files Like many other websites, this site uses log files to help learn about when, from where, and how often traffic flows to this site. The information in these log files include: * Internet Protocol addresses (IP) * Types of browser * Internet Service Provider (ISP) * Date and time stamp * Referring and exit pages * Number of clicks All of this information is not linked to anything that is personally identifiable. ### Cookies and Web Beacons When you visit this site "convenience" cookies are stored on your computer when you submit a comment to help you log in faster to [Disqus](http://disqus.com) the next time you leave a comment. Third-party advertisers may also place and read cookies on your browser and/or use web beacons to collect information. This site has no access or control over these cookies. You should review the respective privacy policies on any and all third-party ad servers for more information regarding their practices and how to opt-out. If you wish to disable cookies, you may do so through your web browser options. Instructions for doing so can be found on the specific web browsers' websites. #### Google Analytics Google Analytics is a web analytics tool I use to help understand how visitors engage with this website. It reports website trends using cookies and web beacons without identifying individual visitors. You can read [Google Analytics Privacy Policy](http://www.google.com/analytics/learn/privacy.html). Blog posts
{% include base_path %} {% capture written_year %}'None'{% endcapture %} {% for post in site.posts %} {% capture year %}{{ post.date | date: '%Y' }}{% endcapture %} {% if year != written_year %}{{ year }}
{% capture written_year %}{{ year }}{% endcapture %} {% endif %} {% include archive-single.html %} {% endfor %}
{"/about/":"https://ignacioalvmar.com/","/about.html":"https://ignacioalvmar.com/","/md/":"https://ignacioalvmar.com/markdown/","/markdown.html":"https://ignacioalvmar.com/markdown/","/nmp/":"https://ignacioalvmar.com/non-menu-page/","/nmp.html":"https://ignacioalvmar.com/non-menu-page/","/cv/":"https://ignacioalvmar.com/resume/","/wordpress/blog-posts/":"https://ignacioalvmar.com/year-archive/"} Jupyter notebook markdown generator
# Jupyter notebook markdown generator These .ipynb files are Jupyter notebook files that convert a TSV containing structured data about talks (`talks.tsv`) or presentations (`presentations.tsv`) into individual markdown files that will be properly formatted for the academicpages template. The notebooks contain a lot of documentation about the process. The .py files are pure python that do the same things if they are executed in a terminal, they just don't have pretty documentation.
{% if page.xsl %} {% endif %} {% assign collections = site.collections | where_exp:'collection','collection.output != false' %}{% for collection in collections %}{% assign docs = collection.docs | where_exp:'doc','doc.sitemap != false' %}{% for doc in docs %} {{ doc.url | replace:'/index.html','/' | absolute_url | xml_escape }} {% if doc.last_modified_at or doc.date %}{{ doc.last_modified_at | default: doc.date | date_to_xmlschema }} {% endif %} {% endfor %}{% endfor %}{% assign pages = site.html_pages | where_exp:'doc','doc.sitemap != false' | where_exp:'doc','doc.url != "/404.html"' %}{% for page in pages %} {{ page.url | replace:'/index.html','/' | absolute_url | xml_escape }} {% if page.last_modified_at %}{{ page.last_modified_at | date_to_xmlschema }} {% endif %} {% endfor %}{% assign static_files = page.static_files | where_exp:'page','page.sitemap != false' | where_exp:'page','page.name != "404.html"' %}{% for file in static_files %} {{ file.path | replace:'/index.html','/' | absolute_url | xml_escape }} {{ file.modified_time | date_to_xmlschema }} {% endfor %}
{% if page.xsl %}{% endif %}<feed xmlns="http://www.w3.org/2005/Atom" {% if site.lang %}xml:lang="{{ site.lang }}"{% endif %}>Jekyll <link href="{{ '/' | absolute_url }}" rel="alternate" type="text/html" {% if site.lang %}hreflang="{{ site.lang }}" {% endif %}/>{{ site.time | date_to_xmlschema }} {{ page.url | absolute_url | xml_escape }} {% assign title = site.title | default: site.name %}{% if page.collection != "posts" %}{% assign collection = page.collection | capitalize %}{% assign title = title | append: " | " | append: collection %}{% endif %}{% if page.category %}{% assign category = page.category | capitalize %}{% assign title = title | append: " | " | append: category %}{% endif %}{% if title %}{{ title | smartify | xml_escape }} {% endif %}{% if site.description %}{{ site.description | xml_escape }} {% endif %}{% if site.author %}{{ site.author.name | default: site.author | xml_escape }} {% if site.author.email %}{{ site.author.email | xml_escape }} {% endif %}{% if site.author.uri %}{{ site.author.uri | xml_escape }} {% endif %}{{ post_title }} {{ post.date | date_to_xmlschema }} {{ post.last_modified_at | default: post.date | date_to_xmlschema }} {{ post.id | absolute_url | xml_escape }} {% assign excerpt_only = post.feed.excerpt_only | default: site.feed.excerpt_only %}{% unless excerpt_only %}<![CDATA[{{ post.content | strip }}]]> {% endunless %}{% assign post_author = post.author | default: post.authors[0] | default: site.author %}{% assign post_author = site.data.authors[post_author] | default: post_author %}{% assign post_author_email = post_author.email | default: nil %}{% assign post_author_uri = post_author.uri | default: nil %}{% assign post_author_name = post_author.name | default: post_author %}{{ post_author_name | default: "" | xml_escape }} {% if post_author_email %}{{ post_author_email | xml_escape }} {% endif %}{% if post_author_uri %}{{ post_author_uri | xml_escape }} {% endif %}<![CDATA[{{ post_summary | strip_html | normalize_whitespace }}]]> {% endif %}{% assign post_image = post.image.path | default: post.image %}{% if post_image %}{% unless post_image contains "://" %}{% assign post_image = post_image | absolute_url %}{% endunless %}Human-Computer Interfaces for Speech Applications.
Published in: Patent Office Authors: Shelby Solomon Darnell et al. Citations: 0
Voice-interfaced in-vehicle assistance
Published in: Patent Office Authors: Hans-Peter Fischer, Ignacio Alvarez Citations: 26
Generating voxel representations and assigning trust metrics for ensuring veracity for use with multiple applications
Published in: Patent Office Authors: Robert Adams et al. Citations: 7
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 8
Controller and interface for vehicle seat
Published in: Patent Office Authors: James T Hotary, Ignacio Alvarez, Brian R Dexter Citations: 15
Generating three dimensional models using single two dimensional images
Published in: Patent Office Authors: David I Gonzalez Aguirre, Javier Felip Leon, Ignacio J Alvarez Citations: 4
Realistic sensor simulation and probabilistic measurement correction
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 4
Response of vulnerable road users to visual information from autonomous vehicles in shared spaces
Published in: Patent Office Authors: Walter Morales Alvarez et al. Citations: 31
Technologies for autonomous three-dimensional modeling
Published in: Patent Office Authors: Javier Felip Leon, David I Gonzalez Aguirre, Ignacio J Alvarez Citations: 0
Technologies for contextual natural language generation in a vehicle
Published in: Patent Office Authors: Jesus Gonzalez, Ignacio Alvarez Citations: 11
Trusted vehicle messaging via transparent display
Published in: Patent Office Authors: Darrell Norman LeBlanc et al. Citations: 16
Trusted vehicle telematics using blockchain data analytics
Published in: Patent Office Authors: Ignacio Alvarez, Mic Bowman Citations: 112
10 Driver Capabilities in the Resumption of Control
Published in: Patent Office Authors: Sherrilene Classen, Liliana Alvarez Citations: 4
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 0
Accessibility method and apparatus for autonomous/semi-autonomous driving
Published in: Patent Office Authors: Ignacio J Alvarez, Joshua Ekandem Citations: 4
Distributed traffic safety consensus
Published in: Patent Office Authors: Ignacio J Alvarez, Rafael Misoczki, Andrea Miele Citations: 27
High-fidelity 3D reconstruction using facial features lookup and skeletal poses in voxel models
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 14
Method and device for determining a configuration for an autonomous vehicle
Published in: Patent Office Authors: Alena Rodionova, Ignacio Alvarez Citations: 8
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 12
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 14
Technology to apply driving norms for automated vehicle behavior prediction
Published in: Patent Office Authors: Guixiang Ma et al. Citations: 12
Use of temporal motion vectors for 3D reconstruction
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 0
An online safety guard for intelligent transportation systems
Published in: Patent Office Authors: Bernd Gassmann et al. Citations: 4
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 21
Collaborative safety driving model for autonomous vehicles
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 8
Crowdsourced detection, identification and sharing of hazardous road objects in HD maps
Published in: Patent Office Authors: SM Iftekharul Alam et al. Citations: 40
Detection and mitigation of inappropriate behaviors of autonomous vehicle passengers
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 4
Disambiguation of vehicle navigation actions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Driver and environment monitoring to predict human driving maneuvers and reduce human driving errors
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 12
Driver monitoring system (dms) data management
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 16
Emotional adaptive driving policies for automated driving vehicles
Published in: Patent Office Authors: Jennifer Healey, Victor Palacios Rivera, Ignacio Alvarez Citations: 70
Environment specific model delivery
Published in: Patent Office Authors: Juan Munoz et al. Citations: 1
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Infrastructure assisted efficient collective perception service for connected vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 7
Methods and apparatus to automatically generate code for graphical user interfaces
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 29
Methods and apparatus to implement a neural network
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 1
Methods and devices for a road user
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 4
Methods and devices for a vehicle
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 5
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 4
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Obstacle representation display
Published in: Patent Office Authors: Ignacio Alvarez, Fabricio Novak, Marina Tereza Weishaupt Strano Citations: 0
Optimizing charging, fueling, and parking overheads of fleet vehicles in a maas architecture
Published in: Patent Office Authors: Juan Pablo Munoz et al. Citations: 27
Rogue vehicle detection and avoidance
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 33
Self-adaptive multiresolution digital-plate for multimodal enhanced safety of vehicles
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 4
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 26
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems, methods, and devices for generating and using safety threat maps
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 1
Technologies for labeling and validating human-machine interface high definition-map data
Published in: Patent Office Authors: Domingo Gonzalez et al. Citations: 1
Apparatus and methods for industrial robot code recommendation
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 3
Apparatus and methods for object manipulation via action sequence optimization
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Autonomous vehicle system
Published in: Patent Office Authors: Hassnaa Moustafa et al. Citations: 216
Collaborative 3-D environment map for computer-assisted or autonomous driving vehicles
Published in: Patent Office Authors: Sridhar G Sharma et al. Citations: 14
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 9
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 16
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 23
Driving safety systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 6
Hardware based abstraction sharing of hardware devices across computing platforms
Published in: Patent Office Authors: Mohammad R Haghighat et al. Citations: 0
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
In-cabin acoustic-based passenger occupancy and situation state assessment
Published in: Patent Office Authors: Julio ZAMORA ESQUIVEL et al. Citations: 0
Methods and apparatus to calibrate error aligned uncertainty for regression and continuous structured prediction tasks
Published in: Patent Office Authors: Neslihan Kose Cihangir et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 8
Methods and apparatus to update autonomous vehicle perspectives
Published in: Patent Office Authors: Sara Baghsorkhi et al. Citations: 39
Methods and devices for determining an action in the presence of road users
Published in: Patent Office Authors: Fabian Oboril et al. Citations: 1
Multimodal automatic mapping of sensing defects to task-specific error measurement
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 1
Multimodal sensing in autonomous driving vehicles with self-healing capabilities
Published in: Patent Office Authors: David Arditti Ilitzky et al. Citations: 4
Quantitative driving evaluation and vehicle safety restrictions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 11
Safety system, automated driving system, and methods thereof
Published in: Patent Office Authors: Cornelius Buerkle, Fabian Oboril, Ignacio Alvarez Citations: 0
Safety system for a vehicle
Published in: Patent Office Authors: David Israel GONZÁLEZ AGUIRRE et al. Citations: 1
System and method for acceleration-based vector field maps
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 34
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastián Turek et al. Citations: 0
Systems, devices, and methods involving driving systems
Published in: Patent Office Authors: Florian Geissler et al. Citations: 0
Technologies for enabling collective perception in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 11
Technologies for intelligent traffic optimization with high-definition maps
Published in: Patent Office Authors: Mehrnaz Khodam Hazrati et al. Citations: 0
Technology to handle ambiguity in automated control systems
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Technology to support the coexistence of multiple independent lidar sensors
Published in: Patent Office Authors: Alexander Marshall Merritt et al. Citations: 0
Vulnerable road user safety technologies based on responsibility sensitive safety
Published in: Patent Office Authors: Vesh Raj Sharma Banjade et al. Citations: 24
A vision-based approach for unmanned aerial vehicles to track industrial pipes for inspection tasks
Published in: Patent Office Authors: Sara Roos-Hoefgeest et al. Citations: 12
Automated network control systems that adapt network configurations based on the local network environment
Published in: Patent Office Authors: Javier Perez-Ramirez et al. Citations: 0
Automatic robot perception programming by imitation learning
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 11
Autonomous vehicle system for detecting safety driving model compliance status of another vehicle, and planning accordingly
Published in: Patent Office Authors: Javier Turek et al. Citations: 0
Driving surface protrusion pattern detection for autonomous vehicles
Published in: Patent Office Authors: Jose Rodrigo Camacho Perez et al. Citations: 3
Edge-centric techniques and technologies for monitoring electric vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 5
Enhanced operational domain monitoring and visualization systems and methods
Published in: Patent Office Authors: Ignacio J Alvarez, Yang Liu, Fabricio Novak Citations: 3
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 2
Methods and apparatus to generate vehicle warnings
Published in: Patent Office Authors: Sridhar Sharma et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 0
Methods and apparatus to provide machine programmed creative support to a user
Published in: Patent Office Authors: Ignacio Javier Alvarez et al. Citations: 0
Methods and arrangements to identify activation profile context in training data
Published in: Patent Office Authors: Glen J Anderson et al. Citations: 5
Methods and devices for vehicle safety mechanisms
Published in: Patent Office Authors: Alexander Carl Unnervik et al. Citations: 1
Real-time localization error correction of autonomous vehicle
Published in: Patent Office Authors: LIU Xiaolong et al. Citations: 2
Sensor calibration and sensor calibration detection
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 25
System and method for emergency braking
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 8
Systems, methods, and devices for driving control
Published in: Patent Office Authors: Deepak Dasalukunte et al. Citations: 34
Technology to generalize safe driving experiences for automated vehicle behavior prediction
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 9
Trusted lightweight communication in cloud robotics
Published in: Patent Office Authors: Amr Mokhtar, Hassnaa Moustafa, Ignacio J Alvarez Citations: 0
Affordance-aware, multi-resolution, free-form object manipulation planning
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 1
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 0
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 0
Device and method for route planning
Published in: Patent Office Authors: Yuqing Hou et al. Citations: 1
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 0
Geographic heat or cold distribution model
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 0
High dynamic range imaging using external light source
Published in: Patent Office Authors: Michael Paulitsch et al. Citations: 0
Methods and apparatus to generate acceptability criteria for autonomous systems plans
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Methods and Tools for the Engineering and Assurance of Safe Autonomous Systems (Dagstuhl Seminar 24151)
Published in: Dagstuhl Reports Authors: Elena Troubitsyna et al. Citations: 0
Methods, apparatus, systems and articles of manufacture for providing query selection systems
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 0
Liuyang Yang et al.
No venue listed (2024)
Neural network verification based on cognitive trajectories
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Personalized mobility as a service
Published in: Patent Office Authors: Nesreen K Ahmed et al. Citations: 1
Robotic manipulation planning based on probalistic elastoplastic deformation material point method
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Robust multimodal sensor fusion for autonomous driving vehicles
Published in: Patent Office Authors: Nilesh Ahuja et al. Citations: 1
Safety system for a vehicle
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 0
Scalable Digital Twin Services for intelligent transport systems (ITS) with Optimized Communication and Dynamic Resource Adaptation
Published in: Patent Office Authors: Ned M Smith et al. Citations: 0
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 0
Systems and methods for intrusion detection in vehicle systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 12
Time of flight distance determinations
Published in: Patent Office Authors: Shabbir Ahmed et al. Citations: 0
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Blind spot based risk assessment of road maneuvers
Published in: Patent Office Authors: Rafael Rosales, Ignacio J Alvarez, Michael Paulitsch Citations: 0
Generation of spatial sound signal from auditory perspective of individual
Published in: Patent Office Authors: Rafael Rosales, Ignacio Alvarez, Willem Beltman Citations: 0
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 5
Maneuver coordination service in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 31
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 0
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Safe and scalable model for culturally sensitive driving by automated vehicles
Published in: Patent Office Authors: John Weast et al. Citations: 0
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems and methods for vehicle-occupancy-based and user-preference-based smart routing and autonomous volumetric-occupancy measurement
Published in: Patent Office Authors: Francesc Guim Bernat et al. Citations: 0
This is an item in your portfolio. It can be have images or nice text. If you name the file .md, it will be parsed as markdown. If you name the file .html, it will be parsed as HTML.
Published in Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2010
Manuals were designed to provide support and information about the usage and maintenance of the vehicle. In many cases user’s manuals are the driver’s only guidance. However, lack of clarity and efficiency of manuals lead to user dissatisfaction. In vehicles this problem is even more crucial given that driving a motor vehicle is, for many people, the most complex and potentially dangerous task they will perform during their lifetime. In this paper we present a voice interfaced driver manual that can potentially fix the deficiencies of its alternatives. In addition we aim to provide a case for the integration of such technology in a vehicle to reduce driver distraction, increase driver satisfaction, and manual usability, while also benefiting Original Equipment Manufacturers (OEMs) in lowering costs and reducing the documentation process.
Published in ‘International Journal of Learning Technology’, 2011
This paper investigates the benefits of learning from educational video games compared to learning by reading from a text document. The participants were exposed to Lewis and Clark expedition via a video game or text document. During the learning task, playing the game or reading, participants wore a Brain Computer Interface (BCI) device to gather their level of engagement. After the learning sessions, post-experiment questionnaires were used to assess the amount of information retained after each session. The results of this study suggests that the educational video games might not be significantly engaging, and also that learning by reading a handout may be better for retaining information. Furthermore, this paper briefly discusses the BCI device, and how it can be used to measure engagement of the participants.
Published in ‘Proceedings of AutomotiveUI 2011’, ACM 2011
Natural user interfaces by means of gesture and speech interaction have become a hot topic in research as well as already for real products. Most use cases currently center around consumer electronics devices like smart phones, TV sets, gaming, or other large screens like tabletops. Motivated by the latest results in those areas, our vision is to apply natural user interfaces like gesture and speech interaction to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand allow to design new experiences for operating infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in Adjunct Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2011
The current growth of automotive electronics aims toextend vehicle functionality and information access. Thispaper explores the application of Natural Voice UserInterfaces as a preferred interaction modality with in-vehicle technologies to lower driver distraction effects andimprove the user experience. The benefits and risks ofnatural speech interactions are evaluated in order topropose a driver-centric design guideline based on previousresearch. The paper concludes that driving scenarios canprofit considerably from systems that apply natural speechinterfaces to allow the driver to access information.
Published in Proceedings of Interact 2011, 2011
Voice-interfaced, in-vehicle assistance includes receiving a Voice-based query from a user in the vehicle, and then determining at least one of a user emotional state, user expertise level and speech recognition confidence level associated with the Voice-based query. A text-based query may then be derived from the Voice-based query, and used to search a help database for answers corresponding to the Voice-based query. At least one response is then provided to the user in the form of Voice-based assistance in accordance with at least one of the user emotional state, user expertise level and speech recognition confidence level.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces, ACM 2012
Natural user interfaces—generally based on gesture and speech interaction—are an increasingly hot topic in research and are already being applied in a multitude of commercial products. Most use cases currently involve consumer electronics devices like smart phones, tablets, TV sets, game consoles, or large-screen tabletop computers.Motivated by the latest results in those areas, our vision is to apply natural user interfaces, for example gesture and conversational speech interaction, to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand might allow the design of new user experiences for infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces and to continue the fruitful discussions held at the 1st Workshop on Automotive Natural User Interfaces from AutomotiveUI ’11 in Salzburg, Austria. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in EHU Scientific Production Portal, EHU 2012
This thesis presents the design and development of the Conversational Automotive Assistant, Voice User Help, a conversational system based on the question-answer paradigm and designed to consult vehicle documentation while driving. This work compiles research in the fields of technical documentation, information retrieval, natural language processing, vehicle user interface design, user experience, and affective computing with the goal of creating an adaptive and dynamic assistant that modifies its conversational behavior depending on the user’s emotional state.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 2012)’, 2012
Automotive Natural User Interfaces have the potential to increase user experience providing intuitive interactions for drivers. However, in the complex setting of a driving vehicle, failed interactions with in-vehicle technology can lead to frustration and put drivers in a dangerous situation. This paper evaluates the possibility of applying emotion recognition to vehicular spoken dialogue systems in order to adapt the dialog strategies, in error recovery scenarios. An emotional taxonomy is developed for the interactions with a conversational vehicular application, the Voice User Help. The positive results of the performance of VUH emotion recognizer support the creation of real-time classification of the user emotional state, which serves as basis to emotional reappraisal dialog strategies that mitigate negative effects on the driver’s cognitive load and driver performance.
Published in Journal of Ergonomics, Taylor & Francis Online 2012
The use of brain computer interface (BCI) devices in research and applications has exploded in recent years. Applications such as lie detectors that use functional magnetic resonance imaging (fMRI) to video games controlled using electroencephalography (EEG) are currently in use. These developments, coupled with the emergence of inexpensive commercial BCI headsets, such as the Emotiv EPOC ( http://emotiv.com/index.php) and the Neurosky MindWave, have also highlighted the need of performing basic ergonomics research since such devices have usability issues, such as comfort during prolonged use, and reduced performance for individuals with common physical attributes, such as long or coarse hair. This paper examines the feasibility of using consumer BCIs in scientific research. In particular, we compare user comfort, experiment preparation time, signal reliability and ease of use in light of individual differences among subjects for two commercially available hardware devices, the Emotiv EPOC and the Neurosky MindWave. Based on these results, we suggest some basic considerations for selecting a commercial BCI for research and experimentation.
Statement of Relevance: Despite increased usage, few studies have examined the usability of commercial BCI hardware. This study assesses usability and experimentation factors of two commercial BCI models, for the purpose of creating basic guidelines for increased usability. Finding that more sensors can be less comfortable and accurate than devices with fewer sensors.
Published in Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Springer 2012
The rapid advancement of vehicular technologies has resulted in an exponential increase of new vehicle functions road assistance and connected vehicles services. Vehicle manuals are designed to provide support and information about the use and maintenance of these features. However, current vehicle user manuals do not allow looking for information under driving conditions. This paper presents the Voice User Help, a smart voice-operated system that utilizes natural language understanding and emotional adaptive interfaces to assist drivers when looking for vehicle information with minimal effect on their driving performance. Additionally, the system presents an opportunity for elder drivers to reduce the learning curve of new in-vehicle technologies and improve efficiency. Results on user acceptance of the Voice User Help, as well as cognitive load and driver distraction effects generated during a simulated drive indicate that the Voice User help is an extremely desirable feature and potentially safe application since it did not significantly decrement driving performance. Furthermore preliminary results on adaptive voice interfaces using emotion recognition indicate that personalization of the interaction will be able to palliate possible negative effects that happen during system error recovery.
Published in Jouarnal or Ergonomics, Taylor & Francis 2012
Abstract not available
Not available
Published in ‘Proceedings of AutomotiveUI 2014’, 2014
A major challenge in the future of traffic is to understand how “socially-aware vehicles” could be making use of their social habitus, formed by any information that can be inferred from past and present social relations, social interactions, and a driver’s social state when exposed to other participants in real, live traffic. The aim of this workshop in recognition of this challenge is to advance on a common understanding of the symbiosis between drivers, cars, and the infrastructure. The central objective of the workshop is to provoke an active debate on the adequacy of the concept of social, natural, and peripheral interaction, addressing questions such as “who can communicate what”, “when”, “how”, and “why”? To tackle these questions, we would like to collect different, radical, innovative, versatile, and engaging works that challenge or re-imagine human interactions in the near future automobile space.
Published in ‘Pervasive and Mobile Computing’, 2014
Research on next generation automotive ICT is challenged by the complex interactions of technological advancements and the social nature of individuals using and adopting technology. Traffic in the future will no longer be considered as a network of individually behaving “dumb” cars, but rather as the entirety of social interactions between its entities. Successful application of collective, socially inspired driving mechanisms requires to understand how socially-inspired vehicles (i.e., driver-car pairs) could make use of their social habitus, composed from (past and present) driving behavior, social interactions with pedestrians, vehicles, infrastructure, etc., and drivers’ vital states when exposed to other road participants in live traffic. In response to this emerging research direction, the aim of this workshop is to achieve a common understanding of the symbiosis between drivers, cars, and infrastructure from a global point of view (referred to as “collective driving”). In particular, this workshop is expected to provoke an active debate on the adequacy of the concept of socializing cars, addressing questions such as who can communicate what, when, how, and why?
Published in ‘International journal of human-computer studies’, Elsevier 2015
The growing advancements of in-vehicle electronics and the intrusion of consumer electronics in the vehicle cockpit have increased the complexity of in-car experiences. Therefore, vehicle manuals are needed, now more than ever, to provide information and guidance. Automakers have extended user assistance through multimedia, integrated manuals, online services and telephonic assistance. However, no driver-centric interfaces have been created to provide vehicle documentation assistance effectively. Drivers are expected to interrupt the driving experience in order to find vehicle information in a paper manual. This paper compares the effects on driving performance and cognitive load when consulting a manual in a simulated driving environment through various conditions. These conditions consist of interacting with a voice activated vehicle manual called the Voice User Help, an on-board multimedia manual, a passenger, and a call center. Results suggest that any kind of interaction to access information while driving has an impact on the driver׳s attention based on a decrease in driving performance and increase of cognitive load. However, amongst all modalities, voice interfaces seem to be the better option for consulting information while driving. Also, and under some circumstances, interaction with a conversational manual system appears to be safer than human-to-human communication.
Published in ‘Extended Proceedings of the 7th International Conference on Automotive User’, 2015
This paper outlines and evaluates experiential prototyping for emerging vehicle UX design within a pedagogical framework. Drawing from studio experience, we discuss the learnings, options and risks that in-vehicle UX designers face in prototyping realtime, adaptive user interfaces, and suggest methods and solutions for designers wishing to expand their creative practice.
Published in ‘Adjunct Proceedings AutomotiveUI ’15’, ACM 2015
As driving is mainly a visual task, auditory displays play a critical role for in-vehicle interactions. To improve invehicle auditory interactions to the advanced level, auditory display researchers and automotive user interface researchers came together to discuss this timely topic at an in-vehicle auditory interactions workshop at the International Conference on Auditory Display (ICAD). The present paper reports discussion outcomes from the workshop for more discussions at the AutoUI conference.
Published in ‘AutomotiveUI 2015’, 2015
The search term “driver-vehicle interaction study” results in 2,690 Google Scholar hits of research papers published in the past 5 years (2010-2015). This huge number clearly points out the problem that researchers (particularly, new to this field) are exposed to, namely that many decisions regarding the setting, (e.g., lab/field, low-/high-fidelity simulator, within/between subjects, sample size, biased subject, learning effect, sensor technology, mobile hardware, synchronization issues, briefing, etc.) have to be established early in the design phase without the reference of principled guidelines and best practices to support the min identifying the optimal solution to answer their research question of interest. This workshop invites a) people activein the field to share their experiences in executing studies to measure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draft research questions, present their problems, and discuss possible solutions with the other participants.
Published in Proceedings of Automotive UI 2015, ACM 2015
A major challenge in today’s as well as future driving is to keep drivers informed about the vehicle’s state and the environment. Today’s assistant and infotainment systems compete for the drivers’ attention and may even distract them from the primary driving task. Further, with an increase in automation, the vehicle needs to be able to communicate information with different urgency levels. While some information are not important and should never distract a driver from important tasks, there are also calls for action, which a driver should not be able to ignore. We believe in adaptive ambient displays and peripheral interaction as one possible way to unobtrusively present information while being able to switch the driver’s attention if needed. In this workshop the focus lies in exchange of best known methods and discussion on challenges and potentials for this kind of interaction in today’s scenarios as well as in future mixed or full autonomous traffic. The central objective of this workshop is to bring together researchers from different domains and discuss radical, innovative, and engaging ideas and a future landscape for research in this area.
Published in Proceedings of Automotive UI 2015, ACM 2015
The search term “driver-vehicle interaction study” results in2,690 Google Scholar hits of research papers published inthe past 5 years (2010-2015). This huge number clearlypoints out the problem that researchers (particularly, new tothis field) are exposed to, namely that many decisionsregarding the setting, (e.g., lab/field, low-/high-fidelitysimulator, within/between subjects, sample size, biasedsubject, learning effect, sensor technology, mobilehardware, synchronization issues, briefing, etc.) have to beestablished early in the design phase without the referenceof principled guidelines and best practices to support themin identifying the optimal solution to answer their researchquestion of interest. This workshop invites a) people activein the field to share their experiences in executing studies tomeasure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draftresearch questions, present their problems, and discusspossible solutions with the other participants.
Published in * Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications*, ACM 2016
On July 1st 2016, the first automated vehicle fatality became headline news [9] and caused a nationwide wave of concern. Now we have at least one situation in which a controlled automated vehicle system failed to detect a life threatening situation. The question still remains: How can an autonomous system make ethical decisions that involve human lives? Control negotiation strategies require prior encoding of ethical conventions into decision making algorithms, which is not at all an easy task – especially considering that actually coming up with ethically sound decision strategies in the first place is often very difficult, even for human agents. This workshop seeks to provide a forum for experts across different backgrounds to voice and formalize the ethical aspects of automotive user interfaces in the context of automated driving. The goal is to derive working principles that will guide shared decision-making between human drivers and their automated vehicles.
Published in Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2016
This workshop will focus on the problem of occupant and vehicle situational awareness with respect to automated vehicles when the driver must take over control. It will explore the future of fully automated and mixed traffic situations where vehicles are assumed to be operating at level 3 or above. In this case, all critical driving functions will be handled by the vehicle with the possibility of transitions between manual and automated driving modes at any time. This creates a driver environment where, unlike manual driving, there is no direct intrinsic motivation for the driver to be aware of the traffic situation at all times. Therefore, it is highly likely that when such a transition occurs, the driver will not be able to transition either safely or within an appropriate period of time. This workshop will address this challenge by inviting experts and practitioners from the automotive and related domains to explore concepts and solutions to increase, maintain and transfer situational awareness in semi-automated vehicles.
Published in Dagstuhl Reports, Dagtsuhl 2016
The next big change in the automotive domain will be the move towards automated and semi-automated driving. We can expect an increasing level of autonomous driving in the coming years, resulting in new opportunities for the car as an infotainment platform when standard driving tasks will be automated. This change also comes with a number of challenges to automotive user interfaces. Core challenges for the assistance system and the user interface will be distributing tasks between the assistance system and the driver, the re-engagement of drivers in semi-automated driving back to the driving task, and collaborative driving in which cars collectively work together (e.g., platoons). Overall, in the coming years we will need to design interfaces and applications that make driving safe while enabling communication, work, and play in human-operated vehicles. This Dagstuhl seminar brought together researchers from human computer interaction, cognitive psychology, human factors psychology and also from automotive industry and OEMs to discuss the new interface paradigms for (semi-)automated driving.
Published in ‘Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’16)’, ACM 2016
Automotive user experiences can be increasingly personalized and adaptive thanks to advances in in-vehicle sensors and user modelling but current automotive software development frameworks still require large software development efforts to create custom interaction solutions. In this paper we propose a novel system architecture aimed at supporting automotive researchers and designers by simplifying the prototyping process towards novel adaptive user interfaces. We describe the integration of RealSense sensors and the Context Sensing SDK with the Skyline driving simulator framework. The combination of these tools allows rapid prototyping of in-cabin context aware interactions. The paper presents two use cases of in-cabin-aware prototypes, a user profile loading interface that recognizes identities and occupant roles and an L4 to L3 take-over control interface using RealSense and Context sensing APIs to detect in-vehicle events and Skyline to present real-time adaptive warning interfaces. The resulting experiences are core components of an intelligent ADAS framework for research of IVI personalization and highly automated collaborative driving.
Published in ‘Proceeding of Automotive UI 2017’, ACM 2017
Abstract not yet available.
Published in ‘Automotive user interfaces: creating interactive experiences in the car’, 2017
Given the rapid advancement of technologies in the automotive domain, driver–vehicle interaction has recently become more and more complicated. The amount of research applied to the vehicle cockpit is increasing, with the advent of (highly) automated driving, as the range of interaction that is possible in a driving vehicle expands. However, as opportunities increase, so does the number of challenges that automotive user experience designers and researchers will face. This chapter focuses on the instrumentation of sensing and displaying techniques and technologies to make better user experience while driving. In the driver–vehicle interaction loop, the vehicle can sense driver states, analyze, estimate, and model the data, and then display it through the appropriate channels for intervention purposes. To improve the interaction, a huge number of new/affordable sensing (EEG, fNIRS, IR imaging) and feedback (head-up displays, auditory feedback, tactile arrays, etc.) techniques have been introduced. However, little research has attempted to investigate this area in a systematic way. This chapter provides an overview of recent advances of input and output modalities to be used for timely, appropriate driver–vehicle interaction. After outlining relevant background, we provide information on the best-known practices for input and output modalities based on the exchange results from the workshop on practical experiences for measuring and modeling drivers and driver–vehicle interactions at AutomotiveUI 2015. This chapter can help answer research questions on how to instrument a driving simulator or realistic study to gather data and how to place interaction outputs to enable appropriate driver interactions.
Published in ‘International Journal of Mobile Human Computer Interaction (IJMHCI)’, 2017
This paper describes the research and development process of an in-vehicle user experience using Skyline, an automotive prototyping platform created in Intel Labs to empower interaction designers and user experience researches to rapidly and iteratively develop and test in-vehicle user experience concepts. The paper describes the hardware and software components of Skyline in depth and how to configure them to suit individual researcher needs. The paper also presents a case study to exemplify the design making process that Skyline enables. From ideation to use-case creation, prototyping and validation through user assessment, the paper showcases the benefits of capturing early qualitative user feedback as support for rapid prototyping walking through a study titled Agency vs. Control and the associated interactions inside the cockpit. Ten defined use-cases are developed and integrated into a hero scenario in Skyline. High fidelity HMI concepts are tested and validated over the course of six months with feedback from a total of fifty users.
Published in ‘Springer Nature Advances in Human Aspects of Transportation’, Springer 2017
Advancements of in-vehicle technologies and the development of mobile applications that keep a driver connected in a driving environment have caused an increasingly dangerous safety concern. Distracted driving has gained the attention of legislators and governments globally. Countries have constituted bans that partially or fully forbid drivers from using gadgets while driving, especially hindering out-of-the-vehicle communications. This paper introduces Voiceing™, a voice-activated application meant to improve social communications in the car, serving as a safe alternative to distracted driving. Other modalities of interaction such as texting, in-vehicle conversations and outside-of-the-vehicle conversation have been measured and compared with Voiceing™ investigating effects on driver’s performance, cognitive load and user acceptance. Results from this study suggest that Voiceing™ is a safer alternative than in-vehicle interactions with humans. Results also show that natural speech interaction of in-vehicle applications and the inclusion of context awareness help improve driving performance while interacting with a vehicle system.
Published in Automotive User Interfaces: Creating Interactive Experiences in the Car, Springer Book, Springer 2017
In-vehicle experiences are made up mainly of mundane small moments, repeated practices, and taken-for-granted decisions that make up daily experiences in and around private passenger vehicles. Understanding what those experiences are for drivers around the world presents an opportunity for designing novel interactive experiences, technologies, and user interfaces for vehicles. In this chapter, we present a set of tools, methodologies, and practices that will help reader create a holistic design space for future mobility. Transitioning between ethnography, insights, prototyping, experience design, and requirements decomposition is a challenging task even for experienced UX professionals. This chapter provides guidance in this matter with practical examples.
Published in ‘Automotive User Interfaces: Creating Interactive Experiences in the Car’, ACM 2017
Informing a driver of a vehicle’s changing state and environment is a major challenge that grows with the introduction of in-vehicle assistant and infotainment systems. Even in the age of automation, the human will need to be in the loop for monitoring, taking over control, or making decisions. In these cases, poorly designed systems could lead to needless attentional demands imparted on the driver, taking it away from the primary driving task. Existing systems are offering simple and often unspecific alerts, leaving the human with the demanding task of identifying, localizing, and understanding the problem. Ideally, such systems should communicate information in a way that conveys its relevance and urgency. Specifically, information useful to promote driver safety should be conveyed as effective calls for action, while information not pertaining to safety (therefore less important) should be conveyed in ways that do not jeopardize driver attention. Adaptive ambient displays and peripheral interactions have the potential to provide superior solutions and could serve to unobtrusively present information, to shift the driver’s attention according to changing task demands, or enable a driver to react without losing the focus on the primary task. In order to build a common understanding across researchers and practitioners from different fields, we held a Workshop on Adaptive Ambient In-Vehicle Displays and Interactions at the AutomotiveUI`15 conference. In this chapter, we discuss the outcomes of this workshop, provide examples of possible applications now or in the future and conclude with challenges in developing or using adaptive ambient interactions.
Published in Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2017
Automated driving systems (ADS) are mainly regarded from an innovation and technology-centered perspective. In academia, as well as in industry, there is a concentration on technical issues to maintain competitiveness while aspects like acceptance, trust and user experience are widely under-researched. However, the “human factor” is critical for a comprehensive establishment of ADS technology on the market. We believe that there is a need to focus on a user-centered design (UCD) perspective to bring ADS innovation to a next level and to achieve a wide acceptance in society. In this workshop we want to discuss special requirements of UCD applied to ADS, to address challenges and opportunities and to reveal new research fields for future work.
Published in ‘Springer Natural Digital Human Modelling’, Springer 2018
As development of automated vehicles and adoption of electric vehicles continue to grow, there is an increasing interest in the public opinions on these technologies. We conducted an international online survey to gather information about people’s hopes and concerns for automated and electric vehicles from a total of 866 people from four countries – Austria, Germany, South Korea, and USA. Results revealed some differences across countries in the perceptions of automated and electric vehicles. However, differences between the same countries have shrunk compared to our previous survey completed in 2012. Results are discussed with limitations and future work.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18)’, ACM 2018
Augmented reality (AR) has the potential to improve road safety, support more immersive (non-) driving related activities, and finally enhance driving experience. AR may also be the enabling technology to help on the transition towards automated driving. However, augmented reality still faces a number of technical challenges when applied in vehicles, and also several human factors issues need to be solved. In this workshop, we will discuss potential and constraints as well as impact, role, and adequacy of AR in driving applications. The primary goal of this workshop is to define a research agenda for the use of AR in intelligent vehicles within the next 3 to 5 years.
Published in ‘Automotive UI 2018’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications AutomotiveUI 2018’, ACM 2018
In-car emotion detection and regulation have become an emerging and important branch of research within the automotive domain. Different emotional states can greatly influence human driving performance and user experience both in manual and automated driving conditions. The monitoring and regulation of relevant emotional states is therefore important to avoid critical driving scenarios with the human driver being in charge, and to ensure comfort and acceptance in autonomous driving. In this workshop we want to discuss the empathic user interface research to address challenges and opportunities and to reveal new research directions for future work. This workshop provides a forum for exchange and discussion on empathic user interfaces, including methods for emotion recognition and regulation, empathic automotive human-machine interaction design, user evaluation and measurements, and subsequent improvement of autonomous driving experience.
Published in Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), IEEE 2018
Current automated driving systems assume drivers continuously monitor the vehicle. Meanwhile, fully automated vehicles aim at not requiring human intervention for their safely operation. The industry is currently debating how these novel systems can be certified under functional safety standards. In this paper, we argue that the current safety picture is not comprehensive enough, since it alienates users. We propose experiential safety as a complement to existing functional safety and to develop a framework for experiential safety interactions between the user and automation in automated driving environments. To support the experiential safety design model, we provide an overview of the user-centered research on experiential automation safety, which includes results from online surveys, personal interviews, and gamified group workshops. We explore current user behaviors by focusing on what makes them feel safe as drivers and passengers, and how unexpected events and automation responses might impact their perception of safety. Among the highlighted results, we show how mismatched expectations and unexpected behaviors from autonomous vehicles can lead to frustration and compromised trust. We also show how automation feedback to the user can generate stress and anxiety if not properly configured and how a cooperative relationship between automation and the driver leads to more satisfying driving experiences. Finally, we present guidelines for the experiential safety to be applied by automotive engineers and designers in their development of automated driving technologies.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
We foresee conversational driver assistants playing a crucial role in automated driving interactions. In this video we present a study of user interactions with an in-vehicle agent, “Theo”, under SAE Level 4 automated driving. We use a remote Wizard-of-Oz setup where participants, sitting in a driving simulator, experience real-life video footage transmitted from a vehicle in the neighborhood and interact with Theo to instruct the vehicle where to go. We configured Theo to present 3 levels of conversational abilities (terse, verbose and helpful). We show the results of 9 participants tasked to negotiate destinations and route changes. Voice interaction was reported as preferred means of communication with Theo. There was a clear preference for talkative assistants which were perceived more responsive and intelligent. We highlight challenging interactions for users such as vehicle maneuvers in parking areas and specifying drop off points and interesting associations between the agent performance and the automated vehicle abilities.
Published in Proceedings of the 13th IEEE International Conference on Automatic Face & Gesture Recognition, IEEE 2018
Automated driving has the potential to reduce the amount of fatal crashes, lighten the burden of commutes, and democratize mobility access to wider populations. But delegation of control to automation is not without issues. One of the foreseen drawbacks is that users might experience negative emotional reactions to unanticipated or unexplainable automated maneuvers. In this paper we present a novel method to induce targeted emotional reactions, frustration and startle, in simulated automated driving environments. We describe the data collection process for 17 driver - passenger dyads and discuss the data labelling method for generating reliable novel emotion datasets. This contribution is a foundational methodology towards expanding emotional understanding in automated vehicles, a critical skill for building long-term trusted experiences.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
Automated driving systems (ADS), especially in higher levels of automation, seem to be the new focus of innovation regarding future mobility. Technological achievements of traveling automation open up new challenges for road traffic. Existing automotive research focuses on problem solving and observational approaches including users and their imagination of the future of mobility to analyze acceptance and user experience of “incremental” (step-wised improved) innovations. On the other hand, “radical” (something new, enabled by technology or meaning change) innovations extensively increase product quality leaping over incremental innovation. This workshop aims to challenge the current research approaches to automated driving against “trying to improve sitting in a horse carriage” and discuss how we can design “radical” innovations for ADS beyond the “horse carriage”. Within this interactive workshop, we will utilize a design thinking approach to refocus on underlying problems that ADSs originally aim to solve and generate ideas for radical innovations.
Published in Proceedings of the 2019 International Conference on Intelligent Transportation Systems (ITSC), IEEE 2019
The scientific knowledge and tools for the mass deployment of Automated Vehicles (AVs) are maturing rapidly, as evidenced by the wide deployment of AV test fleets worldwide. These vehicles have the potential to produce tremendous economic and societal benefits including greatly reduced traffic accidents, injuries, and congestion, and to make less expensive, more flexible and more productive transportation available to all. But one challenge looms above all others in the race to full vehicle automation; solving the AV Safety Assurance challenge. Automated transportation is not just a product, but an industry. And it is as an industry that we must together solve this challenge. We invite researchers, automakers, technology companies, and government regulators to come together to develop a holistic model to define and measure AV Safety. In this special session we present papers that provide contributions to the definition, applicability and standardization of AV safety assurance, including methods for the development of metrics, benchmarks and evangelisation of AV Safety Assurances to users and the public. This session continues the open discussion started in 2018 ITSC with the goal of making AV Safety a reality. The session will consist of high quality paper presentations as well as a panel discussion with some of the most relevant figures of the AV industry.
Published in ‘IEEE Intelligent Transportation Systems Conference’, IEEE 2019
The recent trend of integrating vehicular communications with advanced sensors installed on vehicles, enables Connected and Autonomous Vehicles (CAVs) to share their own driving information as well as perception information, such as a list of perceived objects (e.g., dynamic obstacles such as vehicles, pedestrians, and cyclists, and static obstacles). This has the potential to improve driving safety by expanding collective perception of vehicles. However, adversaries may also populate false information to other Connected Vehicles (CVs) via Vehicle-to-Vehicle (V2V) communications. This paper investigates the security aspects of mixed deployment of CAVs, CVs and legacy vehicles, and in particular with regards to misbehavior detection. We provide a generic design framework that is independent from the specific algorithms of the underlying perception system, and can be used to implement a practical Misbehavior Detection System (MDS). We analyze the MDS framework w.r.t. a ghost vehicle attack. While no computing system can be completely secure, we believe this work would help the industry to develop a practical MDS design within a common framework while allowing individual techniques to mature and evolve over time with future academic research.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in Proceedings of 2019 IEEE Intelligent Transportation Systems Conference (ITSC), IEEE 2023
Advances in vehicular communication technologies have made Connected Vehicles (CVs) a near-term reality. Compared to models where vehicles rely solely on their own perception to sense and make decision on the environment, CVs have the potential to allow information sharing among vehicles to improve sensing and decision making collectively. A first concrete step towards this goal is enabling vehicles to share perception-related information, to overcome limitations of their respective sensors (e.g., partial awareness due to occlusions). Sharing processed information vs raw sensor data has the advantage of reducing the amount of data to be transmitted, and the required computation burden at the receiver side.This paper proposes an approach to enable object-level sharing among vehicles. Following state-of-the-art object-level management techniques, we developed a two-layer architecture that handles object tracking and fusion from dynamic remote sources of information. We implemented our approach and showed that it can achieve realistic performance, and robustness both in terms of quality of information and computation.
Published in ‘Proceedings of the IEEE International Conference in Intelligent Transportations Systems 2019’, IEEE 2019
To study naturalistic in-cabin emotion we developed SKYNIVI, a modified open source driving simulator, with scenarios designed to elicit startle and frustration. We target generating these emotions because we believe that by detecting these it will be possible for autonomous vehicles to learn to drive better. We show how to use SKYNIVI to develop datasets that capture naturalistic emotions in drivers and passengers for algorithmic development. We recruited 51 participants as dyads and single drivers to participate in two different scenarios. We show that we were able to evoke hundreds of instances of our target emotions in this cohort and present an analysis of factors we found to impact emotional expression including: scenario design , demographic factors, personality and baseline affect . We find that having a second person in the vehicle impacts observed expressions of emotion even when no difference in baseline affect is reported.
Published in ‘Proceedings of the IEEE Intelligent Vehicle Symposium 2019’, IEEE 2019
The need for safety in Automated Driving (AD) is becoming increasingly critical with the accelerating deployment of this technology. Beyond functional safety, industry must guarantee the operational safety of automated vehicles. Towards that end, Mobileye introduced the Responsibility Sensitive Safety (RSS), a model-based approach to Safety [1]. In this paper we expand upon this work introducing the C++ Library for Responsibility Sensitive Safety, an open source executable that implements a subset of RSS. We provide architectural details to integrate the C++ Library for Responsibility Sensitive Safety with AD Software pipelines as safety module overseeing decision making of driving policies. We illustrate this application with an example integration with the Baidu Apollo AD stack and simulator, [2] and [3], that provides safety validation of the planning module. Furthermore, we show how the C++ Library for Responsibility Sensitive Safety can be used to explore the usefulness of the RSS model through parameter exploration and analysis on minimum safe longitudinal distance, (dmin), considering different weather conditions. We also compare these results with half-of-speed rule followed in some parts of the world. We expect that the C++ Library for Responsibility Sensitive Safety becomes a critical component of future tools for formal verification, testing and validation of AD safety and that it helps bootstrap the AD research efforts towards standardization of safety.
Published in ‘Transportation research interdisciplinary perspectives’, 2020
This paper provides a framework for examining human-vehicle interactions with respect to three dimensions that can involve models or simulations: the agents, the environments, and the scenarios. Agents are considered on a spectrum from human to artificial actors. Environments are considered on a spectrum from simulated to real. Scenarios are considered on a spectrum from constrained to unconstrained. It is argued that these three dimensions capture key differences in research approaches within the field of human-vehicle interaction, and that explicitly situating research and discussions within this framework will allow researchers to better compare and contrast research outcomes and contributions. The framework is used to locate different disciplines in the community with respect to one another, and to identify areas which are as-yet unexplored.
Published in ACM IX Interaction Journal, 2020
ACM SIGCHI Auto-UI is a growing community, but one in which some continents were less involved than expected and hoped for. For the 2019 conference in Utrecht, the Netherlands, we made various targeted attempts to grow and diversify our international community, with support from the ACM SIGCHI Development Fund. Our efforts resulted in a growth in the number of Asian participants, which made up almost 20 percent of the attendees. In this blog, we briefly reflect on our initiatives and on a panel discussion focusing on research topics that matter more globally to the Auto-UI field.
Published in ‘Proceedings of 12th International Conference in Automotive User Interfaces and Interactive Vehicular Applications’, 2020
Driver performance and behavior can be partially predicated based on one’s emotional state. Through ascertaining the emotional state of passengers and employing various mitigation strategies, empathic cars can show potential in improving user experience and driving performance. Challenges remain in the implementation of such strategies, as individual differences play a large role in mediating the effect of affective intervention. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of targeted emotion intervention methods. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this short workshop, researchers will determine ideal intervention methods for prospective user groups. This will be achieved through the method of insight combination to generate and discuss ideas.
Published in In proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, IEEE 2020.
Safety is an important challenge in the development of automated vehicles (AVs). To help with the challenge of achieving higher safety in the decision making of AVs, Intel and Mobileye have proposed a parameterized model named Responsibility-Sensitive Safety (RSS). Previous studies have demonstrated that RSS has the potential to improve the safety performance of automated vehicles. However, RSS could lead to a considerable car-following distance depending on the parameter values chosen for the model, which could reduce traffic efficiency. To improve the efficiency of RSS applied to Adaptive Cruise Control (ACC) systems, previous work proposed an efficiency-optimal (referred as “Efficiency-optimal RSS”) variation of the RSS model that involves different triggering conditions of a proper response. Therefore, in this paper a human-in-the-loop driving simulation experiment was conducted to evaluate the performance and acceptance of different safety methods. The RSS model and the efficiencyoptimal variant were embedded in an ACC system based on Model Predictive Control (MPC) algorithm. Two car-following scenarios with a sudden deceleration of lead vehicle at various time headways were simulated to evaluate the human perception and response of the different models. Results show that the original RSS model improves subjective safety judgment of human drivers. While the Efficiency-optimal RSS variant has a lower subjective safety score when compared to original RSS, it significantly reduces driver’s emergency braking reactions when compare to an ACC only system.
Published in Proceedings of IEEE Intelligent Vehicle Symposium 2020, IEEE 2020.
The determination of safety assurances for automated driving vehicles is one of the most critical challenges in the industry today. Several behavioral safety models for automated driving have been proposed recently and standards discussions are on the way. In this paper we present a method to automatically explore the performance of automated vehicle (AV) safety models utilizing robustness of Metric Temporal Logic (MTL) specifications as a continuous metric of safety. We present a case study of the Responsibility Sensitive Safety model (RSS), introducing a safety evaluation pipeline based on the CARLA driving simulator, RSS and a set of safety-critical driving scenarios. Our method automatically extracts safety relevant profiles for these scenarios providing practical parametric boundaries for implementation. Furthermore, we evaluate the trade-offs between safety and utility within the safe RSS parameter space through a proposed naturalistic benchmark challenge that we open-sourced. We analyze different RSS parameter configurations including assertive and more conservative settings, extracted by our specification-driven framework. Our results show that while maintaining the safety boundaries, the extracted RSS configuration for assertive driving behavior achieves the highest utility.
Published in ‘Proceedings of 2020 AAAI Conference’, AAAI 2020
Automated driving is an ML-intensive problem and its safety depends on the integrity of perception as well as planning and control. Responsibility Sensitive Safety (RSS) is a recent approach to promote safe planning and control that relies on perfect perception; however, perceptual uncertainty is always present, and this causes the possibility of misperceptions that can lead an autonomous vehicle to allow unsafe actions. In this position paper, we sketch a novel proposal for a formal model of perception coupled with RSS to help mitigate the impact of misperception by using information about perceptual uncertainty. The approach expresses uncertainty as imprecise perceptions that are consumed by RSS and cause it to limit actions to those that support safe behaviour given the perceptual uncertainty. We illustrate our approach using examples and discuss its implications and limitations.
Published in ‘Proceedings of IEEE Intelligent Transportation Systems Conference 2021’, IEEE 2021
Recently, Collective Perception Messages (CPM) that carry additional information about the surrounding environment beyond Basic Safety Messages (BSM) or Cooperative Awareness Messages (CAM) have been proposed to increase the situational awareness for Connected and Automated Vehicles (CAV) in Intelligent Transportation Systems. However, blindly trusting perception information from neighbors that cannot be locally verified is dangerous given the safety impact that erroneous or malicious information might have. This paper addresses the data trust challenge of CPMs, proposing a misbehavior detection scheme called MISO- V (Multiple Independent Sources of Observations over V2X) that leverages the inherently overlapping nature of the perception observations from multiple vehicles to verify the semantic correctness of the V2X data and improve the data trust and robustness of V2X systems. CPM-enabled CAVs are implemented and MISO-V performance is evaluated in CARLA-based simulation tool, where falsified V2X packets presenting a ghost car are injected in a suburban T-junction scenario with other cars. The results show that MISO- V is very effective in detecting the ghost car attacks and removing the impact of such misbehavior from influencing the receiver and offers a conservative and sensible approach towards trustworthy Collective Perception Services for CAVs.
Published in Proceedings of the IEEE Intelligent Vehicles Symposium (IV), IEEE 2021
The need for safety in automated driving is undisputed. Since automated vehicles are expected to reduce the number of fatalities in road traffic significantly, hundreds of millions of test kilometers would be required for statistical safety validation [1]. Physics-based safety verification approaches are promising in order to reduce this validation effort. Towards this goal, Mobileye introduced the concept of Responsibility-Sensitive Safety (RSS). In RSS, bounds for the reasonable worst-case behavior of traffic participants are assumed to be given, such as the reaction time or the maximum deceleration. These parameters have a crucial effect on the applicability of the approach: choosing conservative parameters likely hinders traffic flow, while the opposite could lead to collisions, as the assumptions are violated. Thus, in this work, we focus on finding reasonable parameters of RSS. Based on the physical limits, legal requirements and human driving behavior, we propose scopes and parameter sets that allow for a sound safety verification while not hindering traffic flow. Furthermore, we present an approach that explains seemingly frequent human drivers’ RSS violations on highways and may lead to a useful extension of RSS.
Published in ‘SAE Technical Paper’, SAE 2021
As industry races to complete technical development of automated driving systems (ADS), important questions are being raised about how to measure the safety of such systems and the overall safety of Automated Vehicles (AVs). Traffic safety engineers have for decades utilized metrics to assess the safety of human drivers and measurements such as Time To Collision (TTC) and Time Headway (THW) have proven to be a useful indicator of increased risk of an accident for human drivers. But what if we can do better with AVs? Are human driving derived risk metrics meaningful for a self-driving vehicle? Recently, the Institute for Automated Mobility (IAM) published a set of metrics defined specifically for self-driving vehicles that provide a thorough assessment of the safety of an AV. While humans must use estimation and cautious judgement to make decisions, AVs can use precise measurement techniques via sensors and correlate multiple sources of data in real time. Utilizing information such as the reaction time of the ADS, the braking capability of the AV and more, the IAM proposed metrics allow for the assessment of the safety of an AV to be accurately measured, not as a notion of approximated risk, but as a binary calculation of safety. In this paper we analyze, compare and contrast human driving, risk-oriented safety metrics with the more definitive metrics proposed for AVs. We answer important questions about the necessary evolution of human derived metrics to ensure they are meaningful in the assessment of the safety of an AV, as well as whether novel metrics proposed for AVs can be used to better understand and assess the safety performance of AVs when compared to historical safety measures. Our research proves that AV-based assessment metrics can provide better insight into the safety of both AVs and human drivers.
There is little doubt that driving generates emotional responses, whether that’s the joy of freedom, the boredom of stop-and-go traffic or anger towards unsafe maneuvers. In this chapter we provide an overview of emotion research applied to the automotive context and highlight the impact of emotional states in varying levels of driving automation. We review the most critical research findings on the impact of emotional states in driving performance including reaction time and take-over readiness. We also discuss the application of emotion regulation strategies related to the driving task. Finally, we analyze the research challenges still present for robust emotional classification and personalization in their application to in-vehicle interactions. This technology offers great potential for the development of emotionally-aware in-cabin driver assistants which will play a critical role in the future of automated driving user experience development.
Published in ‘Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, ACM 2022
Empathic in-vehicle interfaces can address driver affect and mitigate decreases in driving performance and behavior that are associated with emotional states. Empathic vehicles can detect and employ a variety of intervention modalities to change user affect and improve user experience. Challenges remain in the implementation of such strategies, as a broader established view of practical intervention modalities and strategies is still absent. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of displays and alternatives suitable to various use case situations in current and future vehicle states. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this workshop, researchers will create a design flowchart for in-vehicle affective display designers when creating displays for an empathic vehicle.
Published in ‘Proceedings of ACM’s Computer Human Interaction Conference (CHI)’, ACM 2022
Empathic vehicles are expected to improve user experience in automated vehicles and to help increase user acceptance of technology. However, little is known about potential real-world implementations and designs using empathic interfaces in vehicles with higher levels of automation. Given advances in affect detection and emotion mitigation, we conducted two workshops (N1 =24, N2 = 22, Ntotal = 46) on the design of empathic vehicles and their potential utility in a variety of applications. This paper recapitulates key opportunities in the design and application of empathetic interfaces in automated vehicles which emerged from the two workshops hosted at the ACM AutoUI conferences.
This standard applies to road vehicles. It defines a minimum set of reasonable assumptions and foreseeable scenarios that shall be considered in the development of safety related models that are part of an automated driving system (ADS). Scope: This standard applies to road vehicles. For a set of scenarios, a minimum set of assumptions regarding reasonably foreseeable behaviors of other road users are defined that shall be considered in the development of safety-related models for automated driving systems (ADS). This standard further defines a list of attributes common to contributed safety-related models and methods to help verify whether a safety-related model takes the minimum set of assumptions into consideration. An informative annex instantiates several examples of how the proposed minimum set of assumptions could be employed in ADS development. Sources of uncertainty, such as prediction or perception errors, are out of scope to this standard. This standard does not guarantee the safety of the overall system in all scenarios. Purpose: Government and Industry alike need an open, transparent, and technology-neutral standard that provides guidance useful for evaluating the performance of an ADS. This guidance consists of a minimum set of assumptions with bounds on reasonably foreseeable behaviors of other road users used in the development of safety-related models.
@ARTICLE{9761121, author={}, journal={IEEE Std 2846-2022}, title={IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems}, year={2022}, volume={}, number={}, pages={1-59}, keywords={IEEE Standards;Autonomous vehicles;Vehicle safety;Autonomous driving;Vehicle driving;Data privacy;Decision making;ADS;ADS-operated vehicle;automated driving system;assumption;automated vehicle;autonomous vehicles;AV;decision-making;IEEE 2846}, doi={10.1109/IEEESTD.2022.9761121}}
Published in Proceedings of the IEEE 2022 Winter Simulation Conference, IEEE 2023
Ensuring the safety of autonomous vehicle (AV) relies on accurate prediction of error occurrences in its perception system. Due to the inter-stage functional dependence, the error occurred at a certain stage may be propagated to the following stage and generate extra errors. To quantify the error propagation, this paper adopts the physics-based simulation, which enables fault injection at different stages of an AV perception system to generate error event data for error propagation modeling. A multi -stage Hawkes process (MSHP) is proposed to predict the error occurrences in each stage, with error propagation represented as a latent triggering mechanism. With explicitly considering the error propagation mechanism, the proposed outperforms benchmark methods in predicting error occurrence in a physics-based simulation of a multistage AV perception system. The proposed two-step likelihood-based algorithm accurately estimates the model coefficients in a numerical simulation case study.
Published in ‘MDPI Sensors’, 2022
Connected and automated driving technologies have the potential to revolutionize transportation by facilitating mobility services to a wider population, improving safety and traffic efficiency. Automated driving technology is expected to reduce the number of accidents caused by human error and avert deadly crashes, ensure mobility for all, including old and impaired individuals, allow the human driver to perform alternative (secondary) tasks, increase traffic flow efficiency, reduce fuel consumption, and lower emissions.
Driven by these goals, humankind is experiencing an exponential growth in vehicle automation taking over the monitoring of surroundings and vehicle control tasks from human drivers in a quest towards full autonomy. Connected and automated vehicles are equipped with multimodal sensors that allow continuous perception and monitoring of driving tasks to assist drivers in lower levels of SAE automation or to fully take control of driving tasks under full SAE automation. Numerous sensors, both inside and outside vehicles, allow the detection and identification of oncoming obstacles, the determination of their velocity, and the prediction of future behaviours to avoid potential collisions. Each sensor has its own strengths and weaknesses in terms of range, accuracy, energy consumption. and sensitivity towards external conditions such as weather and light. Automated vehicles usually rely on a mix of signals to improve operational reliability and robustness under the dynamic external conditions of real-world deployments. Generally, we can divide external AV sensors into two major groups: active and passive. Active sensors generate an active signal (electromagnetic or light) transmitted to the external environment to analyse its reflection (e.g., radar, lidar), whereas passive sensors just record the information from the environment (e.g., camera). Additionally, there have been advances in intelligent transportation infrastructure to monitor road users, perform predictive analytics, and facilitate collaborative perception services and remote vehicle control.
The increasing commercial availability of conditional automation (SAE level 3) and the incoming Robotaxi services (SAE Level 4) have also resulted in an increase in in-cabin monitoring sensors dedicated to monitoring driver and passenger behaviours. Multimodal in-cabin monitoring systems are crucial enablers for successfully managing automated vehicle operations. These systems enable the detection of the driver/passenger’s physiological state and activity to assess their readiness to take over control of the vehicle if required as well as to monitor their safety. Driving monitoring solutions provide information on occupants’ fatigue, distraction, discomfort, and stress. Furthermore, they can help to verify that automation is used properly by evaluating engagement in the driving monitoring task or the inherent risk of the non-driving tasks.
This Special issue aims to collect original theoretical or empirical articles on different sensing technologies, solutions, and applications for automated vehicles.
Published in Journal Name, 2023
This book is dedicated to user experience design for automated driving to address humane aspects of automated driving, e.g., workload, safety, trust, ethics, and acceptance. Automated driving has experienced a major development boost in recent years. However, most of the research and implementation has been technology-driven, rather than human-centered. The levels of automated driving have been poorly defined and inconsistently used. A variety of application scenarios and restrictions has been ambiguous. Also, it deals with human factors, design practices and methods, as well as applications, such as multimodal infotainment, virtual reality, augmented reality, and interactions in and outside users. This book aims at 1) providing engineers, designers, and practitioners with a broad overview of the state-of-the-art user experience research in automated driving to speed-up the implementation of automated vehicles and 2) helping researchers and students benefit from various perspectives and approaches to generate new research ideas and conduct more integrated research.
Published in IEEE Standards, 2022
This document presents a review of relevant literature (e.g., standards, regulations, and scientific publications) that investigated kinematic behavior of road users. This review is intended to serve as a key contribution to the Automated Driving Systems (ADS) research and industry communities, as well as to current standardization efforts, such as IEEE Std 2846, IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems.
Published in ‘2023 IEEE 26th International Conference on Intelligent Transportation Systems’, IEEE 2023
Areas of limited visibility are common in day-to-day traffic: be it static buildings, parked vehicles, traffic participants blocking the vehicle’s line of sight, harsh weather conditions or just narrow curves that impede the automated driving sensor suite to inspect the road ahead. Autonomous vehicles have to be able to safely cope with this kind of constraints. The Responsibility-Sensitive Safety model (RSS) demands vehicles to exercise caution with respect to occlusions and to consider also occluded road agents. This paper provides a concrete implementation of how occlusions in RSS can be addressed and investigates the balance between safety and usefulness of the model when a reasonably foreseeable behavior of occluded road agents is assumed. We perform occlusion experiments in urban as well as on highway scenarios with the driving simulation platform CARLA applying different parameterization of the agents kinematic properties and the safety model parameters to analyse and judge the consequences with respect to safe driving and overcautious driving behaviors.
Published in ‘Proceedings of ACM’s Automotive UI 2023’, ACM 2023
This workshop aims to design advanced empathic user interfaces for in-vehicle displays, particularly for high-level automated vehicles (SAE level 3 or higher). Incorporating model-based approaches for understanding human emotion regulation, it seeks to enhance the user-vehicle interaction. A unique aspect of this workshop is the integration of generative artificial intelligence (AI) tools in the design process. The workshop will explore generative AI’s potential in crafting contextual responses and its impact on user experience and interface design. The agenda includes brainstorming on various driving scenarios, developing emotion-oriented intervention methods, and rapid prototyping with AI tools. The anticipated outcome includes practical prototypes of affective user interfaces and insights on the role of AI in designing human-machine interactions. Through this workshop, we hope to contribute to making automated driving more accessible and enjoyable.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Empathic in-vehicle interfaces are critical in improving user safety and experiences. There has been much research on how to estimate drivers’ affective states, whereas little research has investigated intervention methods that mitigate potential impacts from the driver’s affective states on their driving performance and user experiences. To enhance the development of in-vehicle interfaces considering emotional aspects, we have organized a workshop series to gather automotive user interface experts to discuss this topic at the International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutoUI). The present paper focuses particularly on the intervention methods created by the experts and proposes design recommendations for future empathic in-vehicle interfaces. We hope this work can spark lively discussions on the importance of drivers’ affective states in their user experience of automated vehicles and pose the right direction.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Safety Assurance remains a challenge for the large-scale deployment of Automated Driving Systems (ADS). Safety models monitor the performance of the ADS. Most safety models are validated both in simulation and during on-road tests. However, first-hand experiences and analysis of ADS safety models are not easily accessible to the general research community. This paper introduces the RSS driving demonstrator an open-source simulation tool that enables first-hand experience of the Responsibility Sensitive Safety (RSS) safety model proposed by Intel and Mobileye and adopted by several Automotive Industry standards and regulatory frameworks. The RSS demonstrator enables first-hand interactions and experience of ADS safety model restrictions in both automated and manual driving conditions. As a User Experience (UX) tool, it provides quantitative safety metrics and flexible user interaction features. The results indicate it served to both evangelize the RSS ADS safety model with laymen population and is a versatile tool for Automotive UX development.
Published in ‘Adjunct Proceedings of the 16th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2024
The rapid advancement of automated vehicles has aroused the curiosity of researchers in the automotive field. Understanding the emotional aspects of this technology is critical to improving human-vehicle interactions. The topics of the proposed workshop will be expanded from internal to external empathetic interface designs of automated vehicles. The workshop will gather researchers and practitioners to brainstorm and design affective internal and external interfaces for automated vehicles, targeting specific use cases within the social context. During the workshop, participants will use an affective design tool and generative AI to prototype affective interface designs in automated vehicles. With this creative approach, we aim to expand the knowledge of affective eHMIs in addition to in-vehicle designs and understand social factors that contribute to the user perceptions of automated vehicles.
Published in ‘Transportation Research Part C: Emerging Technologies’, 2024
Ensuring the reliability of sensor-fusion-based perception systems is crucial for the safe deployment of autonomous vehicles. Such systems function through a sequence of interconnected stages, where errors in upstream stages may propagate to downstream stages and trigger additional errors. The cross-stage error propagation conceptually exists and makes errors in different stages, not independent, posing model challenges, estimation challenges, and data challenges for reliability modeling. The existing methods cannot be applied to address all these challenges. Thus, this paper presents a recursive event-triggering point process to explicitly consider the error propagation based on the simulated data. The data are simulated from a proposed error injection framework, which can generate various errors from a sequence of interconnected stages in a perception system. The latent and probabilistic error propagation information is incorporated into a modified expectation–maximization (EM) algorithm for parameter estimation. The numerical and physics-based simulation case studies demonstrate the prediction accuracy and interpretability of the proposed modeling methodology.
Published in Proceedings fo the Human Factors and Ergonomics Society Annual Meeting, 2025
The rapid development of automated vehicles offers promising avenues to enhance user experience and safety by integrating empathic in-vehicle interfaces. The report from the workshop Emotion GaRage series, held during the AutomotiveUI ’23 conference, investigates the potential of employing generative artificial intelligence (AI) to develop these empathic interfaces. Our workshop emphasized the importance of emotion recognition and regulation for passengers in driving contexts and the role of future in-vehicle empathic interfaces. Through collaborative design sessions, participants developed personalized in-vehicle agents to address drivers’ emotional states to improve safety and enjoyment. We explored insights by investigating the potential and possibilities of using generative AI in the design process. This report discusses the significance of empathic displays in facilitating the adoption of automated vehicles and explores the potential and limitations of using generative AI in the design phases.
Published in Adjunct Proceedings of the 17th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2025
This paper investigates how in-car conversational agents can support parents driving with young children—a group prone to distraction and cognitive overload. In a high-stress driving simulator study, 22 participants experienced a navigation assistant using four modalities: visual, verbal, non-verbal auditory, and haptic. Feedback was collected using a modified NASA TLX (DALI) and interviews. Verbal navigation instructions were rated most effective, reducing stress and distraction, while haptic feedback was seen as a useful secondary channel for urgent cues. Non-verbal auditory signals were largely ineffective in noisy environments. Participants favored multimodal combinations that balanced clarity with low cognitive demand. Based on these findings, we offer design recommendations for adaptive, family-aware in-car systems, emphasizing verbal communication, context sensitivity, and user customization.
I recently had the pleasure of speaking to the students of the Máster de Movilidad Cooperativa Conectada y Autónoma at Universidad Carlos III de Madrid, sharing how Generative AI is reshaping every corner of automated‑driving R&D. My session, “Challenges and Opportunities in Automated Driving in the Era of Agentic AI,” argued that these new AI models are far more than hype, they mark a genuine shift in the way we design, test, and ultimately will trust autonomous vehicles. Here are a few highlights from the talk content.
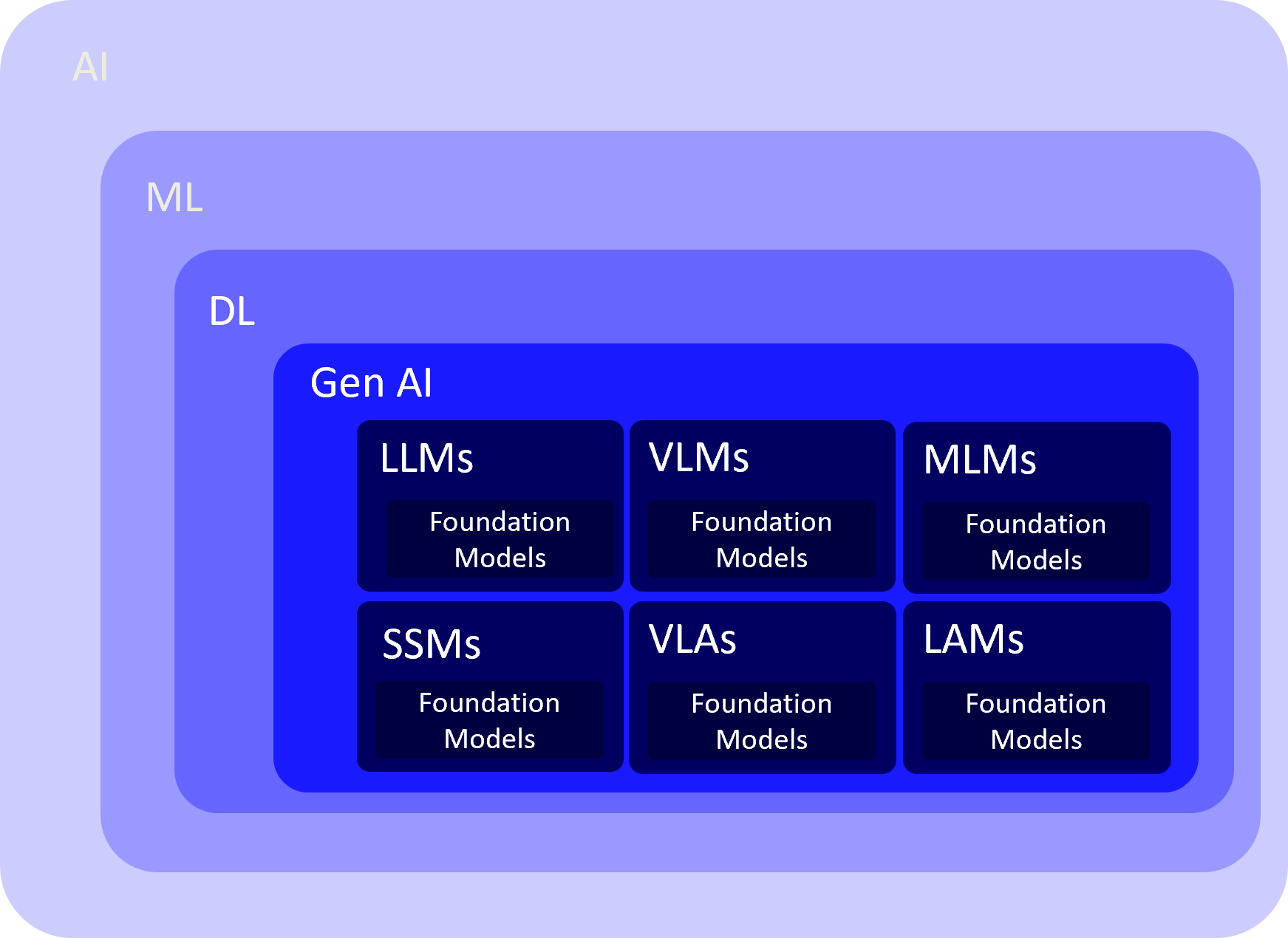
I started by defining what Generative AI means to me. I find that these terms are often overused, and end up meaning different things to different people. In my mind, Generative AI is a subset of Deep Learning, a group of algorithms that create new data rather than merely classify existing inputs. Whether through GANs, VAEs, diffusion pipelines, Transformers, or state‑space networks, these algorithms learn rich distributions of data representations from enormous data corpora and when trained, they become foundation models such as GPT‑n. Unlike hand‑coded software, they’re trained statistical models that approximate facets of human cognition. Based on the type of data they were trained we will have multiple “flavors” of foundation models with different capabilities.
So LLMs are not computer programs, they are “models”. Here is an analogy I like: if a computer program is like a recipe with precise steps, a model, is like having a chef who has learned to cook by tasting countless dishes and understanding flavor combinations. You can ask this “chef” to create new dishes based on this data-driven (learned) understanding, even if they haven’t seen that exact recipe before.
But LLMs are made of code. The “program” in this case is the architecture of the neural network and the learning algorithm, while the “model” is the resulting set of learned weights and biases within that network.

After getting our basis, I turned to the autonomous‑vehicle (AV) pipeline itself, where applications today cover the complete AV development stack. From simulation for realistic synthetic world generation as well as verification and validation, to perception problems, creating maps, predicting road user behaviors and new conversational AI assistants for passengers.
On simulation, I touched on solutions like Scenario Diffusion from Zoox that conjure complex, multi‑agent traffic scenes conditioned on HD maps and textual prompts, or UniSim by Waabi, which transforms mundane driving logs into editable, photorealistic worlds. These synthetic environments slash the expense and risk of road testing while letting engineers probe rare edge cases at scale.
On perception, I showcased DatasetGAN, an NVIDIA technique that simplifies manual labeling tasks and wiht a handful of labeled images spanws vast troves of perfectly segmented data.
One of the highlights on planning applicaitons is BehaviorGPT that impressed everyone with its ability to predict myriad plausible trajectories for every road user, capturing the uncertainty of traffic.
And as we get closer to the frontier of end‑to‑end decision making. DriveGPT4 shows how fused video perception with language‑model reasoning, can output low‑level control commands and natural‑language justifications for human consumption.
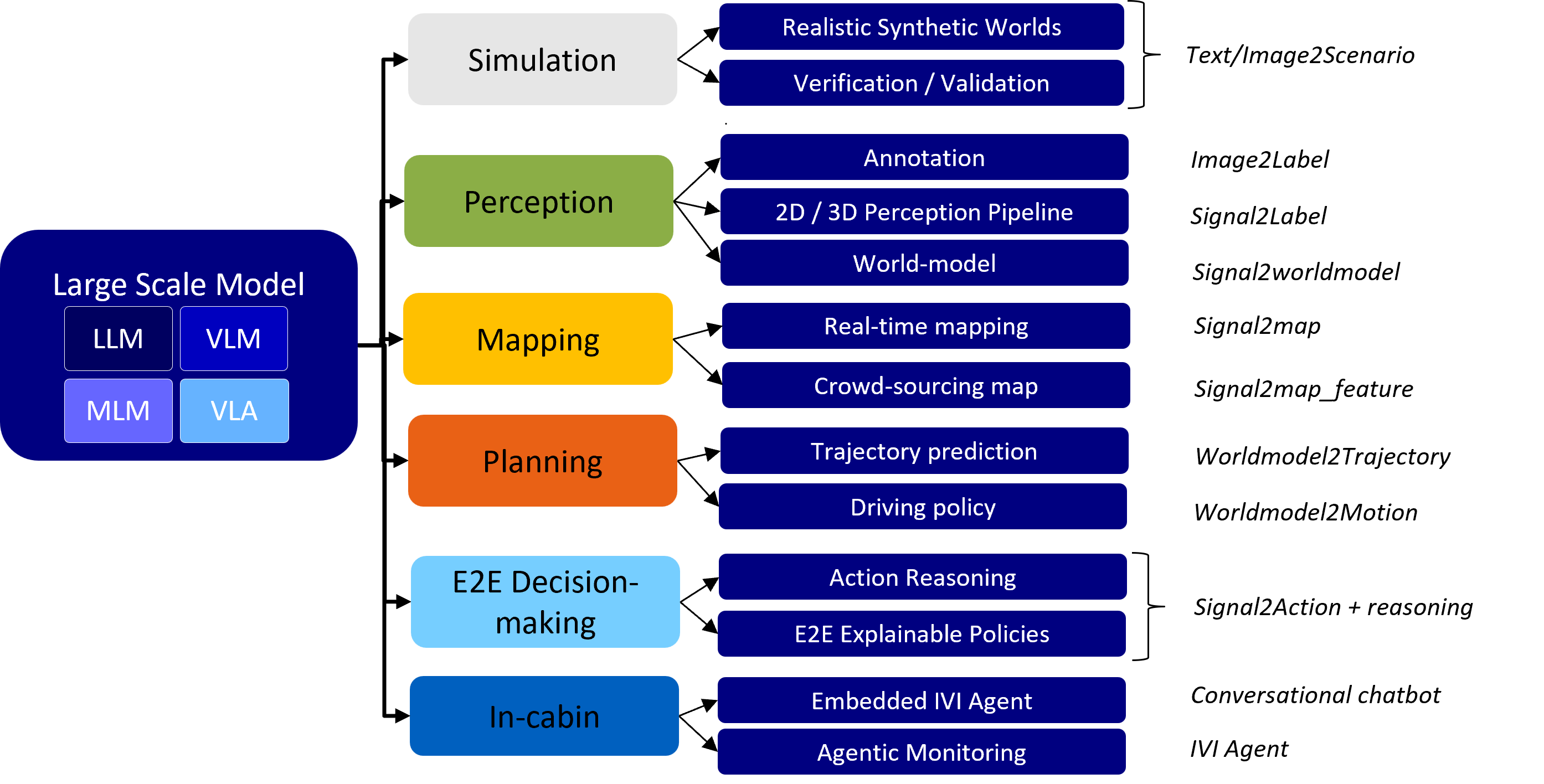
Of course, no talk is complete without a reality check. I emphasized the twin troubles of scarce, high‑quality multimodal data and the scary computational appetite of today’s large models. Achieving sub‑100‑millisecond latency for LLMs on in‑car hardware is no trivial feat. Security and safety are very real threats (think prompt‑injection attacks, IP leakage, nondeterministic outputs, and opaque reasoning) all of these challenge regulators and engineers alike.
Yet the opportunities are equally compelling. Model‑compression tricks like quantization, pruning, and distillation can turn bloated networks into nimble binaries, while neuromorphic chips such as Intel’s Loihi handle spike‑based inference with astonishing energy efficiency. Safety, too, can be engineered: binding language‑model suggestions inside a rigorously proven shell like Mobileye’s RSS keeps behaviors within an acceptable envelope, and tools like LVLM Interpret begin to open the model’s “black box,” offering visibility into why a recommendation was made.

I closed by reminding people that the march towards full autonomy is a marathon, but Generative AI has armed us with fresh answers to old questions. If we address data, performance, security, and safety head‑on, we can unlock a future of safer, more efficient, and more intelligent mobility. The technology is here to stay; our task now is to wield it ethically, safely, and wisely.
Thanks for reading! Contact me if you think the full content of this talk would be of interest to you or and audience of your choice.
—Prof. Ignacio Alvarez

I recently joined a fantastic panel titled “Embodied AI: Invisible Cues”, hosted by Dr Clare Mutzenich and Prof Saber Fallah at the University of Surrey, with guests from Fusion Processing, RIDC, Wayve, University of Leeds, and Waymo.
You can watch the full recording here on YouTube.

I decided to write a little reflection based on the conversation there.
Over the last two decades my research has been developing at the intersection of AI, Automotive Systems, and Human Factors across industry and academia. I see Embodied AI, particularly in the vehicle context, as a deeply socio-technical challenge. It’s not only about engineering autonomy but also ensuring that intelligent systems understand, and are understood, by people.
Over the last 2 decades, but specially in the lats 5 years, technology advancements in AI have produced “amazing algorithms” capable of processing complex data, generalizing well, and making useful predictions. This is fueling the rapid deployment of embodied AI globally today. Still traffic conditions and driving behavior have strong locality effects, driving on the German autobahn is different from driving in India, a highway in Ohio, US flows very differently than a highway in Sichuan, China.
Because of that, embodied AI requires richer context awareness:
These AI-based systems are rapidly scaling worldwide, from Tesla to German premium automakers and, more recently, Chinese OEMs. However, they are all making the same mistake. Design locally, deploy globally doesn’t work. We must design for diversity, validate for local needs, and ensure transparency to drive adoption.
Let me break it down and walk you through my logic.
We’re witnessing AI progressively replace classical vehicle-automation logic.
Although most production systems remain hybrid architectures (that’s AI plus deterministic model-based layers) the trend is clear. Companies like Waymo, Wayve and Mobileye are demonstrating how AI-centric stacks are now viable for real-world operation.

With AI, validation shifts from checking control logic to verifying embedded knowledge and its proper application.
Traditional Automotive verification and validation methods fall short. We need hybrid strategies that accurately measure how the model uses the knowledge embedded within and if any dangerous bias or sensitivityies have been introduced in the training data.
This is still an open problem but we need to combine at least:
I really like Fraunhofer’s work on safety processes (see the fig). But this is not a problem solvable by a single company. It requires collaborative efforts from the whole industry, including automakers, tier one suppliers, researchers, and government entities.

Even if the technology can be developed, making it cheap enough for mass adoption is challenging. Achieving widespread affordability requires both a supportive regulatory framework, incentives for companies to invest fully, and continued research on the area. There are many, many people working on these. But there is an angle that often doesn’t get proper attention. As AI-driven vehicles deploy globally, cultural sensitivity becomes essential.
Traffic norms, trust in automation, and interaction expectations vary dramatically across geographies. Western-trained AI won’t behave intuitively in all contexts. Neither will Asian-trained AI. In the world we live today where AI sovereignity is becoming the norm, this technology protectionism will have negative effects. In essence, Automotive AI must learn to “speak the cultural language” of its users worldwide.
Unlike digital AI, embodied AI operates in shared physical environments.
Users feel the vehicle’s motion, see its sensors, and experience its decisions.
Transparency, that means understanding why the AI acts a certain way, is needed to build comfort and trust.
A system that is legally correct but socially unfamiliar will still feel unsafe.
Clear communication of intent, authority, and decision boundaries is crucial. There are many partially answered but generally unanswered questions like:
These are not just technical questions, they are human-factors questions that to a large extend remain unanswered. They are clearly a research challenge and one that we must solve for all users, worldwide.
No single actor can solve embodied AI alone. To make progress we need cross-industry ecosystems, open frameworks, and shared validation protocols.
We must design for diversity, validate for locals, and let adoption be driven by transparency.
My proposal for this is to:
So as the mobility sector races towards AI-embodied vehicles by “sometime-sooner-than-you-think”, the invisible cues, i.e. how systems signal intent, adapt behavior, and earn user trust, will define success.
I truly believe embodied AI isn’t just about driving. It’s about communicating…
Our task as a community is to ensure that intelligent vehicles can act safely and express their intent in ways that are intuitive across cultures.
—Prof. Ignacio Alvarez
![]()
This course is designed to prepare students for their final thesis. It provides fundamental knowledge to develop a study design based on a problem definition, conduct the study, evaluate it, and interpret the results. Thematic clusters in the area of human-computer interaction (e.g., productivity, automated driving, sports, and digitalization) are offered, from which student groups can choose and propose a specific topic. This topic will be developed iteratively in close professional coordination with the respective supervising lecturers. • Basics of user studies (possible applications, definition of research hypothesis) • Study design (dependent/independent variables, laboratory vs. field studies, within-groups/between-groups design) • Planning of experiments (different methods, “fidelity” of an experiment, software/hardware prototypes, Wizard of Oz studies, qualitative surveys/quantitative measurements, ethical aspects, role of an institutional review board (IRB)) • Study implementation (preparation, briefing/debriefing, finding and inviting test subjects, determining group size, learning effects, measuring variables/data collection) • Qualitative data analysis (content analysis, evaluation with MAXQDA/NVIVO, preparation and presentation of results, revision/fine-tuning in Illustrator) • Quantitative data analysis (reflection on the research hypothesis, use of SPSS for statistical evaluations, parametric/nonparametric statistics, correct choice of method, presentation and interpretation of results) • Written/oral presentation of the results (preparation of results, peer review process, final conference-style presentation)
Recent developments highlight the growing role of automated systems in urban mobility. For example, autonomous delivery robots (ADRs), which facilitate contactless delivery, were increasingly used to support lastmile logistics during the COVID-19 pandemic. Additionally, Waymo’s robotaxis have recently completed 150,000 commercial rides and cover approximately 1.6 million kilometers per week. While these developments offer promising mobility solutions, ensuring broad public acceptance is crucial. One of the challenges currently faced is the risk of vandalism, harassment, and aggression against these systems, which can significantly impact safety, usability, and public trust. Addressing these concerns requires a proactive design approach that mitigates risks and enhances security. Within this seminar, students analyzed aspects of aggression, vandalism, harassment, and abuse directed at autonomous robots (e.g. delivery service robots, automated vehicles) with the goal to develop interfaces and technological solutions that mitigate these risks while ensuring the vehicles remain safe and functional for all users. Based on an individual literature review (related work), students (in groups of two or three) identified key challenges and explored innovative concepts. be developed together in a dedicated brainstorming session and refined/substantiated by the individual teams (with feedback from the lecturer).
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
This course is designed to prepare students for their final thesis. It provides fundamental knowledge to develop a study design based on a problem definition, conduct the study, evaluate it, and interpret the results. Thematic clusters in the area of human-computer interaction (e.g., productivity, automated driving, sports, and digitalization) are offered, from which student groups can choose and propose a specific topic. This topic will be developed iteratively in close professional coordination with the respective supervising lecturers. • Basics of user studies (possible applications, definition of research hypothesis) • Study design (dependent/independent variables, laboratory vs. field studies, within-groups/between-groups design) • Planning of experiments (different methods, “fidelity” of an experiment, software/hardware prototypes, Wizard of Oz studies, qualitative surveys/quantitative measurements, ethical aspects, role of an institutional review board (IRB)) • Study implementation (preparation, briefing/debriefing, finding and inviting test subjects, determining group size, learning effects, measuring variables/data collection) • Qualitative data analysis (content analysis, evaluation with MAXQDA/NVIVO, preparation and presentation of results, revision/fine-tuning in Illustrator) • Quantitative data analysis (reflection on the research hypothesis, use of SPSS for statistical evaluations, parametric/nonparametric statistics, correct choice of method, presentation and interpretation of results) • Written/oral presentation of the results (preparation of results, peer review process, final conference-style presentation)
Empathic in-vehicle interfaces can detect and employ a variety of intervention modalities to change user affect and improve user driving experience, for example mitigating driver distraction associated with emotional states. The emotional tone and behavior of in-cabin AI assistants can also play a significant role in shaping user experience, trust, and satisfaction. Emotional awareness in AI is critical for delivering context-appropriate responses, fostering engagement, and ensuring personalized interaction experiences. In this project, students customized AI agents to exhibit emotionally-aware behaviors that align with predefined user personas. Leveraging conversational design principles, they developed tailored conversational flows, focusing on tone, empathy, and adaptability of the AI agent. Usability testing was conducted to assess the assistant’s emotional relevance, user satisfaction, and the effectiveness of its personality in different in-car scenarios. Deliverables included a fully implemented AI assistant prototype with emotional tuned performance, using services like ChatGPT or Speechify Studio, a usability evaluation report in an Automotive UseCase, and a critical analysis of the effectiveness of emotional-aware AI in the automotive context. Students also explored ethical considerations and challenges in designing emotionally aware systems.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
Ensuring driver alertness is a cornerstone of automotive safety, and Large Language Models (LLMs) offer a unique opportunity to create intelligent systems capable of detecting and mitigating sleepiness. By integrating multimodal inputs such as audio cues, video streams, and driving context signals, LLMs can process complex, real-time data to assess driver state and trigger appropriate actions to maintain alertness. In this project, students will design and prototype an automotive agent powered by LLMs to detect and respond to driver sleepiness. The system will utilize multimodal inputs, such as facial expressions, voice tone, and driving behavior, to compute a sleepiness likelihood metric. Based on the metric and additional contextual awareness signals (e.g., time of day, driving duration), the agent will propose tailored interventions, such as adjusting cabin temperature, suggesting a rest stop, or initiating engaging conversations. Students will evaluate the system’s usability, effectiveness, and user satisfaction, exploring the interplay between AI decision-making and driver interaction.
In this course, students designed and implemented a prototype in-vehicle game that incorporated input from an AV safety model, such as an AV agent equipped with RSS in the CARLA driving simulator to provide feedback on safety-related actions. Students evaluated their designed game for usability, engagement, and its effectiveness in increasing safety awareness in driving scenarios. Deliverables included a functional game prototype, an evaluation report, and insights into the application of gamification in AV safety education.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
Educating vehicle passengers and drivers about safety in autonomous vehicles (AVs) can be a challenge, especially when technical concepts like the Responsibility Sensitive Safety (RSS) model are involved. Gamification offers an innovative way to enhance user engagement and increase awareness of AV safety principles through the more natural interfaces of games by transforming complex concepts into interactive and enjoyable experiences. Integrating a safety model like RSS into a game can provide users with real-time feedback on safe driving practices and decision-making in various scenarios, as well as improve overall situational awareness during non-driving tasks.
In this course, students designed and implemented a prototype in-vehicle game that incorporated input from an AV safety model, such as an AV agent equipped with RSS in the CARLA driving simulator to provide feedback on safety-related actions. Students evaluated their designed game for usability, engagement, and its effectiveness in increasing safety awareness in driving scenarios. Deliverables included a functional game prototype, an evaluation report, and insights into the application of gamification in AV safety education.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
This course provides a practical introduction to the integration of generative AI and “vibe coding” into UX work-flows. Students will: • Explore foundational concepts of Generative AI, focusing on LLMs. • Learn techniques of prompt engineering to effectively direct AI tools. • Apply AI-driven methods to enhance UX research processes, from data collection to synthesis and prototyping. • Utilize AI-assisted development platforms, such as ChatGPT, Replit or Cursor, to prototype interactive user interfaces, tools and applications. • Investigate the emerging paradigm of Agentic AI and its potential to autonomously resolve user experience challenges. • Undertake a comprehensive final project, culminating in designing, building, and deploying a specialized AI agent addressing a defined UX issue.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
Ignacio Alvarez et al.. (2010). Voice interfaced vehicle user help. Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2011). Are educational video games all they are cracked up to be published in International Journal of Learning Technology
Ignacio Alvarez et al.. (2011). Autonui a workshop on automotive natural user interfaces.in Autoui 2011
Ignacio Alvarez et al.. (2011). Designing driver centric natural voice user interfaces. Adjunct Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications. online.
Ignacio Alvarez, Hans-Peter Fischer. (2011). iHelp, the Ubiquitous Vehicle User Help. Proceedings of Interact 2011.
Ignacio Alvarez et al.. (2012). AutoNUI: 2nd Workshop on Automotive Natural User Interfaces.Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces
Ignacio Javier Álvarez Martínez. (2012). Contribution to the development of intelligent conversational assistants in automotive environments. EHU.
Ignacio Alvarez et al.. (2012). Emotional Adaptive Vehicle User Interfaces: moderating negative effects of failed technology interactions while driving. Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 2012).
Joshua I Ekandem et al.. (2012). Evaluating the ergonomics of BCI devices for research and experimentation. Ergonomics.
Ignacio Alvarez, Miren Karmele López-de-Ipiña, Juan E Gilbert. (2012). The voice user help, a smart vehicle assistant for the elderly. International Conference on Ubiquitous Computing and Ambient Intelligence.
Joshua I Ekandem et al.. (2014). Response to Letter by Padulo and Ardigò. Ergonomics.
Ignacio Alvarez et al.. (2014). Social, natural, and peripheral interactions: Together and separate. Proceedings of AutomotiveUI 2014.
Ignacio Alvarez et al.. (2014). The Social Car: Socially-inspired Mechanisms for Future Mobility Services. Pervasive and Mobile Computing.
Ignacio Alvarez et al.. (2015). Help on the road: Effects of vehicle manual consultation in driving performance across modalities. International journal of human-computer studies.
Ignacio Alvarez et al.. (2015). Prototyping adaptive automotive UX: A design pedagogy approach. Extended Proceedings of the 7th International Conference on Automotive User.
Ignacio Alvarez et al.. (2015). Report on the in-vehicle auditory interactions workshop: Taxonomy, challenges, and approaches. Adjunct Proceedings AutomotiveUI ’15.
Ignacio Alvarez et al.. (2015). Skyline: a rapid prototyping driving simulator for user experience. AutomotiveUI 2015.
Andreas Löcken et al.. (2015). Workshop on Adaptive Ambient In-Vehicle Displays and Interactions. Automotive UI 2015.
Andreas Riener et al.. (2015). Workshop on Practical Experiences in Measuring and Modeling Drivers and Driver-Vehicle Interactions. Automotive UI 2015.
Andreas Riener et al.. (2016). 1st workshop on ethically inspired user interfaces for automated driving. Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Rod McCall et al.. (2016). 1st workshop on situational awareness in semi-automated vehicles. Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Andreas Riener, Susanne Boll, Andrew L Kun. (2016). Automotive user interfaces in the age of automation (Dagstuhl Seminar 16262). Dagstuhl reports.
Ignacio Alvarez et al.. (2016). Autonomous hmi made easy: Prototyping reactive in-cabin aware hmis. Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’16).
Ignacio Alvarez et al.. (2017). 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings. Automotive UI 2017.
Ignacio Alvarez et al.. (2017). Driver in the loop: Best practices in automotive sensing and feedback mechanisms. Automotive user interfaces: creating interactive experiences in the car.
Ignacio Alvarez et al.. (2017). Skyline: A Platform Towards Scalable UX-Centric In-Vehicle HMI Development. International Journal of Mobile Human Computer Interaction (IJMHCI).
Ignacio Alvarez et al.. (2017). Socializing under the influence of distracted driving: a study of the effects of in-vehicle and outside-of-the-vehicle communication while driving. Springer Nature Advances in Human Aspects of Transportation.
Ignacio Alvarez et al.. (2017). The insight–prototype–product cycle best practices and processes to iteratively advance in-vehicle interactive experiences development. Automotive User Interfaces: Creating Interactive Experiences in the Car.
Ignacio Alvarez et al.. (2017). Towards Adaptive Ambient In-Vehicle Displays and Interactions: Insights and Design Guidelines from the 2015 AutomotiveUI Dedicated Workshop. Automotive User Interfaces: Creating Interactive Experiences in the Car.
Anna-Katharina Frison et al.. (2017). Workshop on user-centered design for automated driving systems. Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2018). An international survey on automated and electric vehicles: Austria, Germany, South Korea, and USA. Springer Nature.
Ignacio Alvarez et al.. (2018). ARV 2018: 2nd Workshop on Augmented Reality for Intelligent Vehicles. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18).
Ignacio Alvarez et al.. (2018). AutomotiveUI. Automotive UI 2018.
Ignacio Alvarez et al.. (2018). Chairs. Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2018). Emotional GaRage: A workshop on in-car emotion recognition and regulation. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications AutomotiveUI 2018.
Marina Strano et al.. (2018). “Peace of Mind”, An Experiential Safety Framework for Automated Driving Technology Interactions. 2018 21st International Conference on Intelligent Transportation Systems (ITSC).
Ignacio Alvarez et al.. (2018). Theo, take a right... uh... left: Conversational Route Negotiations with Autonomous Driving Assistants. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18).
Nese Alyuz et al.. (2018). Towards understanding emotional reactions of driver-passenger dyads in automated driving. 13th IEEE International Conference on Automatic Face & Gesture Recognition.
Anna-Katharina Frison et al.. (2018). Workshop on designing highly automated driving systems as radical innovation. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18).
Maria Soledad Elli et al.. (2019). 2nd special session on solving the automated vehicle safety assurance challenge. International Conference on Intelligent Transportation Systems (ITSC).
Ignacio Alvarez et al.. (2019). Design of a misbehavior detection system for objects based shared perception V2X applications. IEEE Intelligent Transportation Systems Conference.
Francesco Biondi, Ignacio Alvarez, Kyeong-Ah Jeong. (2019). Human-system cooperation in automated driving. No venue listed.
Ignacio Alvarez et al.. (2019). Human–vehicle cooperation in automated driving: A multidisciplinary review and appraisal. International Journal of Human Computer Interaction.
Moreno Ambrosin et al.. (2019). Object-level perception sharing among connected vehicles. 2019 IEEE Intelligent Transportation Systems Conference (ITSC).
Ignacio Alvarez et al.. (2019). The SKYNIVI experience: evoking startle and frustration in dyads and single drivers. Proceedings of the IEEE International Conference in Intelligent Trasnportations Systems 2019.
Ignacio Alvarez et al.. (2019). Towards standardization of AV safety: C++ library for responsibility sensitive safety. Proceedings of the IEEE Intelligent Vehicle Symposium 2019.
Ignacio Alvarez et al.. (2020). Agents, environments, scenarios: A framework for examining models and simulations of human-vehicle interaction. Transportation research interdisciplinary perspectives.
Ignacio Alvarez et al.. (2020). Auto-UI Global Perspectives. ACM IX Interaction Journal.
Ignacio Alvarez et al.. (2020). Emotion GaRage Vol. II A Workshop on Affective In-Vehicle Display Design. Proceedings of 12th International Conference in Automotive User Interfaces and Interactive Vehicular Applications.
Chen Chai et al.. (2020). Evaluation of responsibility-sensitive safety (rss) model based on human-in-the-loop driving simulation. In proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems.
Alëna Rodionova et al.. (2020). How safe is safe enough? Automatic safety constraints boundary estimation for decision-making in automated vehicles. Proceedings of IEEE Intelligent Vehicle Symposium 2020.
Ignacio Alvarez et al.. (2020). PURSS: Towards Perceptual Uncertainty Aware Responsibility Sensitive Safety with ML.. Proceedings of 2020 AAAI Conference.
Ignacio Alvarez et al.. (2021). MISO-V: Misbehavior detection for collective perception services in vehicular communications. Proceedings of IEEE Intelligent Transportation Systems Conference 2021.
Maximilian Naumann et al.. (2021). On responsibility sensitive safety in car-following situations-a parameter analysis on german highways. In 2021 Proceedings of IEEE Intelligent Vehicles Symposium (IV).
Ignacio Alvarez et al.. (2021). To err is human: The role of human derived safety metrics in an age of automated vehicles. SAE Technical Paper.
Shabnam FakhrHosseini et al.. (2022). Driver emotions in automated vehicles. User Experience Design in the Era of Automated Driving.
Ignacio Alvarez et al.. (2022). Emotion GaRage Vol. III: A Workshop on Affective In-Vehicle Display Applications. Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2022). Empathic vehicle design: Use cases and design directions from two workshops. CHI 2022.
ITS IEEE VT et al.. (2022). IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems. No venue listed.
Fenglian Pan et al.. (2022). Quantifying Error Propagation in Multi-Stage Perception System of Autonomous Vehicles via Physics-Based Simulation. Proceedings of the IEEE 2022 Winter Simulation Conference.
Ignacio Alvarez et al.. (2022). Special Issue. MDPI Sensors.
Andreas Riener, Myounghoon Jeon, Ignacio Alvarez. (2022). User experience design in the era of automated driving. Springer Studies in Computational 980.
ITS IEEE VT et al.. (2022). White Paper-Literature Review on Kinematic Properties of Road Users for Use on Safety-Related Models for Automated Driving Systems. IEEE Standards.
Ignacio Alvarez et al.. (2023). Application of Responsibility-Sensitive Safety in Areas with Limited Visibility: Occlusions in RSS. 2023 IEEE 26th International Conference on Intelligent Transportation Systems.
Ignacio Alvarez et al.. (2023). Emotion GaRage Vol. IV: Creating empathic in-vehicle interfaces with generative AIs for automated vehicle contexts. Proceedings of Automotive UI 2023.
Ignacio Alvarez et al.. (2023). “Play Your Anger”: A report on the empathic in-vehicle interface workshop. Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2023). RSS Demonstrator: a Tool for User Experience Interactions with Automated Driving Safety Models. Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2024). Inside Out: Emotion GaRage Vol. V. Adjunct Proceedings of the 16th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2024). Reliability modeling for perception systems in autonomous vehicles: A recursive event-triggering point process approach. Transportation Research Part C Emerging Technologies.
Choe, M., Dong, J., Bosch, E., Alvarez, I., Oehl, M., Jallais, C., Alsaid, A., & Jeon, M. (2025). Driving with Empathy: Workshop Report on AI-driven In-vehicle Empathic Agent Design for Automated Vehicles. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 0(0).
Esther Carolina Kaehne, Amelie Patzer, Julia Lachmann, and Ignacio Alvarez. 2025. Designing Multimodal In-Car Conversational Agents for Parents: A Simulator Study. In Adjunct Proceedings of the 17th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI25 Adjunct). Association for Computing Machinery, New York, NY, USA, 190–195.
University Invited Lecture at Universidad Carlos 3 Madrid (UCM3), Master de Movilidad Cooperative Conectada, Madrid, Spain
Panel Webinar at University of Surrey x Anthrometric, Online
Single line blockquote:
Quotes are cool.
| Entry | Item | |
|---|---|---|
| John Doe | 2016 | Description of the item in the list |
| Jane Doe | 2019 | Description of the item in the list |
| Doe Doe | 2022 | Description of the item in the list |
| Header1 | Header2 | Header3 |
|---|---|---|
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| Foot1 | Foot2 | Foot3 |
Make any link standout more when applying the .btn class.
Watch out! You can also add notices by appending {: .notice} to a paragraph.
This is an example of a link.
The abbreviation CSS stands for “Cascading Style Sheets”.
“Code is poetry.” —Automattic
You will learn later on in these tests that word-wrap: break-word; will be your best friend.
This tag will let you strikeout text.
The emphasize tag should italicize text.
This tag should denote inserted text.
This scarcely known tag emulates keyboard text, which is usually styled like the <code> tag.
This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
Developers, developers, developers…
–Steve Ballmer
This tag shows bold text.
Getting our science styling on with H2O, which should push the “2” down.
Still sticking with science and Isaac Newton’s E = MC2, which should lift the 2 up.
This allows you to denote variables.
This is a page not in the menu. You can use markdown in this page.
Sorry, but the page you were trying to view does not exist — perhaps you can try searching for it below.
Shaping the Future of Mobility with Human-Centered AI
For over 15 years, I have turned idea concepts into production-ready intelligent systems at Intel and BMW. As a research professor, I am now pioneering the next wave of human-centric AI to build a safer, more intelligent mobility future. This site is an exploration of that journey at the intersection of AI, automotive, and user experience.
Prof. Dr. Alvarez
A variety of common markup showing how the theme styles them.
Single line blockquote:
Quotes are cool.
| Entry | Item | |
|---|---|---|
| John Doe | 2016 | Description of the item in the list |
| Jane Doe | 2019 | Description of the item in the list |
| Doe Doe | 2022 | Description of the item in the list |
| Header1 | Header2 | Header3 |
|---|---|---|
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| Foot1 | Foot2 | Foot3 |
Make any link standout more when applying the .btn class.
Watch out! You can also add notices by appending {: .notice} to a paragraph.
This is an example of a link.
The abbreviation CSS stands for “Cascading Style Sheets”.
“Code is poetry.” —Automattic
You will learn later on in these tests that word-wrap: break-word; will be your best friend.
This tag will let you strikeout text.
The emphasize tag should italicize text.
This tag should denote inserted text.
This scarcely known tag emulates keyboard text, which is usually styled like the <code> tag.
This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
Developers, developers, developers…
–Steve Ballmer
This tag shows bold text.
Getting our science styling on with H2O, which should push the “2” down.
Still sticking with science and Isaac Newton’s E = MC2, which should lift the 2 up.
This allows you to denote variables.
Sorry, but the page you were trying to view does not exist — perhaps you can try searching for it below.
Shaping the Future of Mobility with Human-Centered AI
For over 15 years, I have turned idea concepts into production-ready intelligent systems at Intel and BMW. As a research professor, I am now pioneering the next wave of human-centric AI to build a safer, more intelligent mobility future. This site is an exploration of that journey at the intersection of AI, automotive, and user experience.
Prof. Dr. Alvarez
` tag. ### Preformatted Tag This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
### Quote Tag Developers, developers, developers…
–Steve Ballmer ### Strong Tag This tag shows **bold text**. ### Subscript Tag Getting our science styling on with H2O, which should push the "2" down. ### Superscript Tag Still sticking with science and Isaac Newton's E = MC2, which should lift the 2 up. ### Variable Tag This allows you to denote variables. {% include base_path %} {% for post in site.pages %} {% include archive-single.html %} {% endfor %} </article> </div> Posts by Category
{% include base_path %} {% include group-by-array collection=site.posts field="categories" %} {% for category in group_names %} {% assign posts = group_items[forloop.index0] %}{{ category }}
{% for post in posts %} {% include archive-single.html %} {% endfor %} {% endfor %} Posts by Collection
{% include base_path %} {% capture written_label %}'None'{% endcapture %} {% for collection in site.collections %} {% unless collection.output == false or collection.label == "posts" %} {% capture label %}{{ collection.label }}{% endcapture %} {% if label != written_label %}{{ label }}
{% capture written_label %}{{ label }}{% endcapture %} {% endif %} {% endunless %} {% for post in collection.docs %} {% unless collection.output == false or collection.label == "posts" %} {% include archive-single.html %} {% endunless %} {% endfor %} {% endfor %} CV
{% include base_path %} Education ====== * 2012 International Ph.D in Computer Science, University of the Basque Country & Clemson University * Supervisors: Karmele Lopez Ipina & Juan E. Gilbert * Graduated Summa Cum Laude * 2011 Advance Graduate Research in Engineering, University of Burgos * Graduated Summa Cum Laude * 2006 B.S. in Communication Sciences, University of Burgos * Graduated Summa Cum Laude Work experience ====== * 01/2025 - Present: Profesor of Human-centered Intelligent Systems * THI, Computer Science Faculty, AI Motion Institute * 12/2021 - Present: Principal Engineer, Technical Assistant to Intel Labs Director * Intel Corporation, Intel Labs, Autonomous Driving Research * 09/2014 - 12/2021: Sr. Research Scientist * Intel Corporation, Intel Labs, Autonomous Driving Research * 11/2013 - 09/2014 : Sr. Manager, IT Projects * BMW China * 12/2012 - 11/2013 : Manager, Connected Drive Asia Pacific * BMW China * 02/2012 - 12/2012 : IT Architect * BMW AG * 09/2009 - 02/2012 : Research Associate * BMW USA, Greenville, SC * 09/2009 - 02/2012 : Graudate Research Assistant * Clemson University, School of Computing Skills ====== * Research * Automotive * Automated Driving * Advance Driving Assistance Systems * Safety * Perception * Planning * Connected Vehicles - V2X * Human Factors * Human-Machine Interactions * Driving Monitoring Systems * Technical * Programming * Data Analytics * Product Development * Prototyping * Problem Solving * Languages * Spanish - Native * English / German - Fluent * Chinese - Basic Publications ======{% for post in site.publications %} {% include archive-single-cv.html %} {% endfor %}
Talks ======{% for post in site.talks %} {% include archive-single-talk-cv.html %} {% endfor %}
Teaching ======{% for post in site.teaching %} {% include archive-single-cv.html %} {% endfor %}
Service and leadership ====== * IEEE Sr. Member * ACM Member * IJHCI - Board Member * AutoUI - SC Member * IEEE ITSS - Member
/* * Minimal Mistakes Jekyll Theme * * - Michael Rose * - mademistakes.com * - https://twitter.com/mmistakes * */ @import "vendor/breakpoint/breakpoint"; // media query mixins @import "variables"; @import "mixins"; @import "vendor/susy/susy"; @import "reset"; @import "base"; @import "utilities"; @import "animations"; @import "tables"; @import "buttons"; @import "citations"; @import "notices"; @import "masthead"; @import "navigation"; @import "footer"; @import "syntax"; @import "forms"; @import "page"; @import "archive"; @import "sidebar"; @import "vendor/font-awesome/fontawesome"; @import "vendor/font-awesome/solid"; @import "vendor/font-awesome/brands"; @import "vendor/magnific-popup/magnific-popup"; @import "print"; @import "dark-theme"; Markdown
## Locations of key files/directories * Basic config options: _config.yml * Top navigation bar config: _data/navigation.yml * Single pages: _pages/ * Collections of pages are .md or .html files in: * _publications/ * _portfolio/ * _posts/ * _teaching/ * _talks/ * Footer: _includes/footer.html * Static files (like PDFs): /files/ * Profile image (can set in _config.yml): images/profile.png ## Tips and hints * Name a file ".md" to have it render in markdown, name it ".html" to render in HTML. * Go to the [commit list](https://github.com/academicpages/academicpages.github.io/commits/master) (on your repo) to find the last version Github built with Jekyll. * Green check: successful build * Orange circle: building * Red X: error * No icon: not built ## Resources * [Liquid syntax guide](https://shopify.github.io/liquid/tags/control-flow/) ## Markdown guide ### Header three #### Header four ##### Header five ###### Header six ## Blockquotes Single line blockquote: > Quotes are cool. ## Tables ### Table 1 | Entry | Item | | | -------- | ------ | ------------------------------------------------------------ | | [John Doe](#) | 2016 | Description of the item in the list | | [Jane Doe](#) | 2019 | Description of the item in the list | | [Doe Doe](#) | 2022 | Description of the item in the list | ### Table 2 | Header1 | Header2 | Header3 | |:--------|:-------:|--------:| | cell1 | cell2 | cell3 | | cell4 | cell5 | cell6 | |-----------------------------| | cell1 | cell2 | cell3 | | cell4 | cell5 | cell6 | |=============================| | Foot1 | Foot2 | Foot3 | ## Definition Lists Definition List Title : Definition list division. Startup : A startup company or startup is a company or temporary organization designed to search for a repeatable and scalable business model. #dowork : Coined by Rob Dyrdek and his personal body guard Christopher "Big Black" Boykins, "Do Work" works as a self motivator, to motivating your friends. Do It Live : I'll let Bill O'Reilly [explain](https://www.youtube.com/watch?v=O_HyZ5aW76c "We'll Do It Live") this one. ## Unordered Lists (Nested) * List item one * List item one * List item one * List item two * List item three * List item four * List item two * List item three * List item four * List item two * List item three * List item four ## Ordered List (Nested) 1. List item one 1. List item one 1. List item one 2. List item two 3. List item three 4. List item four 2. List item two 3. List item three 4. List item four 2. List item two 3. List item three 4. List item four ## Buttons Make any link standout more when applying the `.btn` class. ## Notices **Watch out!** You can also add notices by appending `{: .notice}` to a paragraph. {: .notice} ## HTML Tags ### Address Tag 1 Infinite Loop
Cupertino, CA 95014
United States### Anchor Tag (aka. Link) This is an example of a [link](http://github.com "Github"). ### Abbreviation Tag The abbreviation CSS stands for "Cascading Style Sheets". *[CSS]: Cascading Style Sheets ### Cite Tag "Code is poetry." ---Automattic ### Code Tag You will learn later on in these tests that `word-wrap: break-word;` will be your best friend. ### Strike Tag This tag will let you strikeout text. ### Emphasize Tag The emphasize tag should _italicize_ text. ### Insert Tag This tag should denote inserted text. ### Keyboard Tag This scarcely known tag emulates keyboard text, which is usually styled like the `` tag. ### Preformatted Tag This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
### Quote Tag Developers, developers, developers…
–Steve Ballmer ### Strong Tag This tag shows **bold text**. ### Subscript Tag Getting our science styling on with H2O, which should push the "2" down. ### Superscript Tag Still sticking with science and Isaac Newton's E = MC2, which should lift the 2 up. ### Variable Tag This allows you to denote variables. </article> </div> Page not in menu
This is a page not in the menu. You can use markdown in this page. Heading 1 ====== Heading 2 ====== Page Archive
{% include base_path %} {% for post in site.pages %} {% include archive-single.html %} {% endfor %} Patents
{% include base_path %} {% assign postsByYear = site.patents | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Portfolio
{% include base_path %} {% for post in site.portfolio %} {% include archive-single.html %} {% endfor %} Publications
{% if author.googlescholar %} You can also find my articles on my Google Scholar profile. {% endif %} {% include base_path %} {% assign postsByYear = site.publications | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Executive Portfolio
IGNACIO ALVAREZ
Technology Executive | Automotive & AI Leader
📍 Based in Germany · Open to Relocation Globally
Executive Summary
Technology Executive with a track record of CTO-level impact in the Automotive & AI sectors. Proven leader with 15+ years of experience architecting and scaling intelligent systems from R&D to series production, driving 30% YoY R&D ROI amidst budget reductions, leading global R&D organizations of 100+ engineers, and launching platforms adopted by 1M+ users. Expert in defining technical vision that aligns with C-suite objectives, secures market leadership, and generates massive IP value (150+ patents).
Core Competencies
Professional Experience
Tenured Research Professor of Human-centered Intelligent Systems
Technische Hochschule Ingolstadt
2025–Present
Challenge:
Establish and lead cutting-edge research initiatives in human-centered intelligent vehicles while securing substantial funding and building academic-industry partnerships.
Action:
Secured €3M grant from the High-Tech Agenda Program of the Government of Bavaria to develop comprehensive research programs in AI and Automotive. Established THI Doctoral School membership and developed advanced curriculum for Automotive AI Masters and User Experience Design programs.
Result:
Successfully positioned THI as a leading European research institution in AI and Automotive, with substantial funding secured and advanced educational programs established across Computer Science and Engineering faculties.
Principal Engineer & Executive Technical Advisor
Intel Corporation – Intel Labs
2021–2025
Challenge:
Maximize R&D value and strategic impact while managing 8% yearly budget reductions across Intel Labs' global engineering organization, requiring innovative approaches to resource optimization and strategic technology investments.
Action:
Established unified research strategies and cross-functional collaboration across Intel Labs' 500+ person global engineering organization. Steered autonomous driving R&D strategy aligning 100+ multi-regional engineering resources. Served as key technology advisor for M&A, divestiture, and IPO activities within the automotive sector.
Result:
Achieved average 30% YoY increase in R&D ROI, reversing the impact of budget cuts across semiconductor design, packaging, systems, networking, software, algorithmic development and AI. Successfully architected and deployed production-grade automated driving safety systems, reducing validation cycles by ~20% and accelerating compliance with emerging safety regulations.
Senior Research Scientist & Autonomous Driving Lead
Intel Corporation – Intel Labs
2014–2021
Challenge:
Develop and commercialize a comprehensive multimodal in-vehicle R&D platform that integrates cutting-edge technologies while establishing Intel as a leading automotive technology partner and securing substantial research funding.
Action:
Led cross-institutional research collaborations, securing $5M+ in funding and partnerships. Transferred multiple key technologies to Intel's and Mobileye product teams. Led open-source contributions to industry bodies and international standards, bridging research to real-world impact.
Result:
Successfully deployed "Skyline" platform across 10+ global automotive OEMs, showcased at international forums (Google IO, Intel 360). Secured 50+ granted patents and 100+ pending in autonomous systems, AI and robotics. Published 70+ papers and built thought leadership in automotive AI safety and HMI.
Senior IT Manager & Connected Drive Lead
BMW Group
2012–2014
Challenge:
Lead rapid expansion into Asia-Pacific's fastest-growing automotive market while ensuring 24/7 reliability and scalability of connected vehicle services during record growth, and differentiate BMW in a competitive luxury market through innovative in-car technology.
Action:
Managed 100+ IT engineering division across Asia-Pacific, overseeing data centers, telematics, and in-car digital services. Pioneered in-car voice and AI assistants, collaborating with partners like Nuance and Microsoft. Developed integrated multimodal user manual for BMW 7 series.
Result:
Achieved over 1 million new users in the first year, significantly enhancing customer engagement. Launched industry's first natural-language voice assistant and multimodal user manual, setting new standards for in-vehicle HMI and earning industry-wide commendations for innovation.
Advanced Research Roles
BMW IT Research Center and Clemson University, I-CAR
2009–2012
Challenge:
Develop cutting-edge automotive technology prototypes that can inform future product roadmaps while bridging academic research with commercial applications in the automotive industry.
Action:
Collaborated between BMW Technology Office USA and Clemson University to develop functional prototypes for location-based services, voice-activated navigation, augmented reality user manuals, and driver assistance systems.
Result:
Successfully created first proofs-of-concept that informed future BMW product roadmaps, establishing foundational technologies for connected vehicle services and advanced driver assistance systems.
Professional Leadership & Affiliations
IEEE Intelligent Transportation Systems Society – Member of Board of Governors (elected role driving global ITS strategy) ACM AutomotiveUI Conference – Steering Committee Member (shaping annual agenda for automotive UX innovation) Editorial Boards – Board Member for IEEE ITS Magazine and Int. Journal of Human-Computer Interaction Senior Member, IEEE and Member, ACM, SAE (recognized professional standing and contributions in tech)Thought Leadership & Innovation
Patents
Holder of 150+ patents (50+ granted) in autonomous systems, AI, and robotics, shaping the core IP strategy for market-leading mobility solutions.
View Patent Portfolio Publications
Author of 70+ publications in top-tier IEEE and ACM venues and editor of multiple books on autonomous system engineering.
View Publications Industry Standards
Key contributor to the definition of global safety and communication standards for autonomous vehicles through leadership roles in IEEE and ETSI.
View Standards Work Education
Ph.D. in Computer Science (Automotive Intelligent Systems)
University of the Basque Country, Spain & Clemson University, USA, 2012
Summa Cum Laude
Joint international doctoral program focusing on conversational AI for vehicles.
M.Sc. in Media and Information Technology
Hochschule Offenburg, Germany, 2009
Coursework in multimedia systems and human-computer interaction.
B.Sc. in Communication Sciences
University of Burgos, Spain, 2006
Summa Cum Laude
Minor in Telecommunications.
Sitemap
{% include base_path %} A list of all the posts and pages found on the site. For you robots out there is an [XML version]({{ base_path }}/sitemap.xml) available for digesting as well.Pages
{% for post in site.pages %} {% include archive-single.html %} {% endfor %}Posts
{% for post in site.posts %} {% include archive-single.html %} {% endfor %} {% capture written_label %}'None'{% endcapture %} {% for collection in site.collections %} {% unless collection.output == false or collection.label == "posts" %} {% capture label %}{{ collection.label }}{% endcapture %} {% if label != written_label %}{{ label }}
{% capture written_label %}{{ label }}{% endcapture %} {% endif %} {% endunless %} {% for post in collection.docs %} {% unless collection.output == false or collection.label == "posts" %} {% include archive-single.html %} {% endunless %} {% endfor %} {% endfor %} Posts by Tags
{% include base_path %} {% include group-by-array collection=site.posts field="tags" %} {% for tag in group_names %} {% assign posts = group_items[forloop.index0] %}{{ tag }}
{% for post in posts %} {% include archive-single.html %} {% endfor %} {% endfor %} Talk map
This map is generated from a Jupyter Notebook file in /_talks/talkmap.ipynb, which mines the location fields in the .md files in _talks/.
Talks and presentations
{% if site.talkmap_link == true %}{% endif %} {% for post in site.talks reversed %} {% include archive-single-talk.html type='talk' %} {% endfor %} Talks
{% include base_path %} {% assign postsByYear = site.talks | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Teaching
{% include base_path %} {% for post in site.teaching reversed %} {% include archive-single.html %} {% endfor %} Teaching
{% include base_path %} {% assign postsByYear = site.teaching | group_by_exp:"post", "post.date | date: '%Y'" | reverse %} {% for year_group in postsByYear %} <details class="year-details" {% if forloop.first %}open{% endif %}> {{ year_group.name }}
Terms and Privacy Policy
{% include base_path %} {% include toc %} ## Privacy Policy The privacy of my visitors is extremely important. This Privacy Policy outlines the types of personal information that is received and collected and how it is used. First and foremost, I will never share your email address or any other personal information to anyone without your direct consent. ### Log Files Like many other websites, this site uses log files to help learn about when, from where, and how often traffic flows to this site. The information in these log files include: * Internet Protocol addresses (IP) * Types of browser * Internet Service Provider (ISP) * Date and time stamp * Referring and exit pages * Number of clicks All of this information is not linked to anything that is personally identifiable. ### Cookies and Web Beacons When you visit this site "convenience" cookies are stored on your computer when you submit a comment to help you log in faster to [Disqus](http://disqus.com) the next time you leave a comment. Third-party advertisers may also place and read cookies on your browser and/or use web beacons to collect information. This site has no access or control over these cookies. You should review the respective privacy policies on any and all third-party ad servers for more information regarding their practices and how to opt-out. If you wish to disable cookies, you may do so through your web browser options. Instructions for doing so can be found on the specific web browsers' websites. #### Google Analytics Google Analytics is a web analytics tool I use to help understand how visitors engage with this website. It reports website trends using cookies and web beacons without identifying individual visitors. You can read [Google Analytics Privacy Policy](http://www.google.com/analytics/learn/privacy.html). Blog posts
{% include base_path %} {% capture written_year %}'None'{% endcapture %} {% for post in site.posts %} {% capture year %}{{ post.date | date: '%Y' }}{% endcapture %} {% if year != written_year %}{{ year }}
{% capture written_year %}{{ year }}{% endcapture %} {% endif %} {% include archive-single.html %} {% endfor %}
{"/about/":"https://ignacioalvmar.com/","/about.html":"https://ignacioalvmar.com/","/md/":"https://ignacioalvmar.com/markdown/","/markdown.html":"https://ignacioalvmar.com/markdown/","/nmp/":"https://ignacioalvmar.com/non-menu-page/","/nmp.html":"https://ignacioalvmar.com/non-menu-page/","/cv/":"https://ignacioalvmar.com/resume/","/wordpress/blog-posts/":"https://ignacioalvmar.com/year-archive/"} Jupyter notebook markdown generator
# Jupyter notebook markdown generator These .ipynb files are Jupyter notebook files that convert a TSV containing structured data about talks (`talks.tsv`) or presentations (`presentations.tsv`) into individual markdown files that will be properly formatted for the academicpages template. The notebooks contain a lot of documentation about the process. The .py files are pure python that do the same things if they are executed in a terminal, they just don't have pretty documentation.
{% if page.xsl %} {% endif %} {% assign collections = site.collections | where_exp:'collection','collection.output != false' %}{% for collection in collections %}{% assign docs = collection.docs | where_exp:'doc','doc.sitemap != false' %}{% for doc in docs %} {{ doc.url | replace:'/index.html','/' | absolute_url | xml_escape }} {% if doc.last_modified_at or doc.date %}{{ doc.last_modified_at | default: doc.date | date_to_xmlschema }} {% endif %} {% endfor %}{% endfor %}{% assign pages = site.html_pages | where_exp:'doc','doc.sitemap != false' | where_exp:'doc','doc.url != "/404.html"' %}{% for page in pages %} {{ page.url | replace:'/index.html','/' | absolute_url | xml_escape }} {% if page.last_modified_at %}{{ page.last_modified_at | date_to_xmlschema }} {% endif %} {% endfor %}{% assign static_files = page.static_files | where_exp:'page','page.sitemap != false' | where_exp:'page','page.name != "404.html"' %}{% for file in static_files %} {{ file.path | replace:'/index.html','/' | absolute_url | xml_escape }} {{ file.modified_time | date_to_xmlschema }} {% endfor %}
{% if page.xsl %}{% endif %}<feed xmlns="http://www.w3.org/2005/Atom" {% if site.lang %}xml:lang="{{ site.lang }}"{% endif %}>Jekyll <link href="{{ '/' | absolute_url }}" rel="alternate" type="text/html" {% if site.lang %}hreflang="{{ site.lang }}" {% endif %}/>{{ site.time | date_to_xmlschema }} {{ page.url | absolute_url | xml_escape }} {% assign title = site.title | default: site.name %}{% if page.collection != "posts" %}{% assign collection = page.collection | capitalize %}{% assign title = title | append: " | " | append: collection %}{% endif %}{% if page.category %}{% assign category = page.category | capitalize %}{% assign title = title | append: " | " | append: category %}{% endif %}{% if title %}{{ title | smartify | xml_escape }} {% endif %}{% if site.description %}{{ site.description | xml_escape }} {% endif %}{% if site.author %}{{ site.author.name | default: site.author | xml_escape }} {% if site.author.email %}{{ site.author.email | xml_escape }} {% endif %}{% if site.author.uri %}{{ site.author.uri | xml_escape }} {% endif %}{{ post_title }} {{ post.date | date_to_xmlschema }} {{ post.last_modified_at | default: post.date | date_to_xmlschema }} {{ post.id | absolute_url | xml_escape }} {% assign excerpt_only = post.feed.excerpt_only | default: site.feed.excerpt_only %}{% unless excerpt_only %}<![CDATA[{{ post.content | strip }}]]> {% endunless %}{% assign post_author = post.author | default: post.authors[0] | default: site.author %}{% assign post_author = site.data.authors[post_author] | default: post_author %}{% assign post_author_email = post_author.email | default: nil %}{% assign post_author_uri = post_author.uri | default: nil %}{% assign post_author_name = post_author.name | default: post_author %}{{ post_author_name | default: "" | xml_escape }} {% if post_author_email %}{{ post_author_email | xml_escape }} {% endif %}{% if post_author_uri %}{{ post_author_uri | xml_escape }} {% endif %}<![CDATA[{{ post_summary | strip_html | normalize_whitespace }}]]> {% endif %}{% assign post_image = post.image.path | default: post.image %}{% if post_image %}{% unless post_image contains "://" %}{% assign post_image = post_image | absolute_url %}{% endunless %}Human-Computer Interfaces for Speech Applications.
Published in: Patent Office Authors: Shelby Solomon Darnell et al. Citations: 0
Voice-interfaced in-vehicle assistance
Published in: Patent Office Authors: Hans-Peter Fischer, Ignacio Alvarez Citations: 26
Generating voxel representations and assigning trust metrics for ensuring veracity for use with multiple applications
Published in: Patent Office Authors: Robert Adams et al. Citations: 7
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 8
Controller and interface for vehicle seat
Published in: Patent Office Authors: James T Hotary, Ignacio Alvarez, Brian R Dexter Citations: 15
Generating three dimensional models using single two dimensional images
Published in: Patent Office Authors: David I Gonzalez Aguirre, Javier Felip Leon, Ignacio J Alvarez Citations: 4
Realistic sensor simulation and probabilistic measurement correction
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 4
Response of vulnerable road users to visual information from autonomous vehicles in shared spaces
Published in: Patent Office Authors: Walter Morales Alvarez et al. Citations: 31
Technologies for autonomous three-dimensional modeling
Published in: Patent Office Authors: Javier Felip Leon, David I Gonzalez Aguirre, Ignacio J Alvarez Citations: 0
Technologies for contextual natural language generation in a vehicle
Published in: Patent Office Authors: Jesus Gonzalez, Ignacio Alvarez Citations: 11
Trusted vehicle messaging via transparent display
Published in: Patent Office Authors: Darrell Norman LeBlanc et al. Citations: 16
Trusted vehicle telematics using blockchain data analytics
Published in: Patent Office Authors: Ignacio Alvarez, Mic Bowman Citations: 112
10 Driver Capabilities in the Resumption of Control
Published in: Patent Office Authors: Sherrilene Classen, Liliana Alvarez Citations: 4
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 0
Accessibility method and apparatus for autonomous/semi-autonomous driving
Published in: Patent Office Authors: Ignacio J Alvarez, Joshua Ekandem Citations: 4
Distributed traffic safety consensus
Published in: Patent Office Authors: Ignacio J Alvarez, Rafael Misoczki, Andrea Miele Citations: 27
High-fidelity 3D reconstruction using facial features lookup and skeletal poses in voxel models
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 14
Method and device for determining a configuration for an autonomous vehicle
Published in: Patent Office Authors: Alena Rodionova, Ignacio Alvarez Citations: 8
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 12
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 14
Technology to apply driving norms for automated vehicle behavior prediction
Published in: Patent Office Authors: Guixiang Ma et al. Citations: 12
Use of temporal motion vectors for 3D reconstruction
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 0
An online safety guard for intelligent transportation systems
Published in: Patent Office Authors: Bernd Gassmann et al. Citations: 4
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 21
Collaborative safety driving model for autonomous vehicles
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 8
Crowdsourced detection, identification and sharing of hazardous road objects in HD maps
Published in: Patent Office Authors: SM Iftekharul Alam et al. Citations: 40
Detection and mitigation of inappropriate behaviors of autonomous vehicle passengers
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 4
Disambiguation of vehicle navigation actions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Driver and environment monitoring to predict human driving maneuvers and reduce human driving errors
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 12
Driver monitoring system (dms) data management
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 16
Emotional adaptive driving policies for automated driving vehicles
Published in: Patent Office Authors: Jennifer Healey, Victor Palacios Rivera, Ignacio Alvarez Citations: 70
Environment specific model delivery
Published in: Patent Office Authors: Juan Munoz et al. Citations: 1
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Infrastructure assisted efficient collective perception service for connected vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 7
Methods and apparatus to automatically generate code for graphical user interfaces
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 29
Methods and apparatus to implement a neural network
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 1
Methods and devices for a road user
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 4
Methods and devices for a vehicle
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 5
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 4
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Obstacle representation display
Published in: Patent Office Authors: Ignacio Alvarez, Fabricio Novak, Marina Tereza Weishaupt Strano Citations: 0
Optimizing charging, fueling, and parking overheads of fleet vehicles in a maas architecture
Published in: Patent Office Authors: Juan Pablo Munoz et al. Citations: 27
Rogue vehicle detection and avoidance
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 33
Self-adaptive multiresolution digital-plate for multimodal enhanced safety of vehicles
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 4
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 26
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems, methods, and devices for generating and using safety threat maps
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 1
Technologies for labeling and validating human-machine interface high definition-map data
Published in: Patent Office Authors: Domingo Gonzalez et al. Citations: 1
Apparatus and methods for industrial robot code recommendation
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 3
Apparatus and methods for object manipulation via action sequence optimization
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Autonomous vehicle system
Published in: Patent Office Authors: Hassnaa Moustafa et al. Citations: 216
Collaborative 3-D environment map for computer-assisted or autonomous driving vehicles
Published in: Patent Office Authors: Sridhar G Sharma et al. Citations: 14
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 9
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 16
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 23
Driving safety systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 6
Hardware based abstraction sharing of hardware devices across computing platforms
Published in: Patent Office Authors: Mohammad R Haghighat et al. Citations: 0
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
In-cabin acoustic-based passenger occupancy and situation state assessment
Published in: Patent Office Authors: Julio ZAMORA ESQUIVEL et al. Citations: 0
Methods and apparatus to calibrate error aligned uncertainty for regression and continuous structured prediction tasks
Published in: Patent Office Authors: Neslihan Kose Cihangir et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 8
Methods and apparatus to update autonomous vehicle perspectives
Published in: Patent Office Authors: Sara Baghsorkhi et al. Citations: 39
Methods and devices for determining an action in the presence of road users
Published in: Patent Office Authors: Fabian Oboril et al. Citations: 1
Multimodal automatic mapping of sensing defects to task-specific error measurement
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 1
Multimodal sensing in autonomous driving vehicles with self-healing capabilities
Published in: Patent Office Authors: David Arditti Ilitzky et al. Citations: 4
Quantitative driving evaluation and vehicle safety restrictions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 11
Safety system, automated driving system, and methods thereof
Published in: Patent Office Authors: Cornelius Buerkle, Fabian Oboril, Ignacio Alvarez Citations: 0
Safety system for a vehicle
Published in: Patent Office Authors: David Israel GONZÁLEZ AGUIRRE et al. Citations: 1
System and method for acceleration-based vector field maps
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 34
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastián Turek et al. Citations: 0
Systems, devices, and methods involving driving systems
Published in: Patent Office Authors: Florian Geissler et al. Citations: 0
Technologies for enabling collective perception in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 11
Technologies for intelligent traffic optimization with high-definition maps
Published in: Patent Office Authors: Mehrnaz Khodam Hazrati et al. Citations: 0
Technology to handle ambiguity in automated control systems
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Technology to support the coexistence of multiple independent lidar sensors
Published in: Patent Office Authors: Alexander Marshall Merritt et al. Citations: 0
Vulnerable road user safety technologies based on responsibility sensitive safety
Published in: Patent Office Authors: Vesh Raj Sharma Banjade et al. Citations: 24
A vision-based approach for unmanned aerial vehicles to track industrial pipes for inspection tasks
Published in: Patent Office Authors: Sara Roos-Hoefgeest et al. Citations: 12
Automated network control systems that adapt network configurations based on the local network environment
Published in: Patent Office Authors: Javier Perez-Ramirez et al. Citations: 0
Automatic robot perception programming by imitation learning
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 11
Autonomous vehicle system for detecting safety driving model compliance status of another vehicle, and planning accordingly
Published in: Patent Office Authors: Javier Turek et al. Citations: 0
Driving surface protrusion pattern detection for autonomous vehicles
Published in: Patent Office Authors: Jose Rodrigo Camacho Perez et al. Citations: 3
Edge-centric techniques and technologies for monitoring electric vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 5
Enhanced operational domain monitoring and visualization systems and methods
Published in: Patent Office Authors: Ignacio J Alvarez, Yang Liu, Fabricio Novak Citations: 3
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 2
Methods and apparatus to generate vehicle warnings
Published in: Patent Office Authors: Sridhar Sharma et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 0
Methods and apparatus to provide machine programmed creative support to a user
Published in: Patent Office Authors: Ignacio Javier Alvarez et al. Citations: 0
Methods and arrangements to identify activation profile context in training data
Published in: Patent Office Authors: Glen J Anderson et al. Citations: 5
Methods and devices for vehicle safety mechanisms
Published in: Patent Office Authors: Alexander Carl Unnervik et al. Citations: 1
Real-time localization error correction of autonomous vehicle
Published in: Patent Office Authors: LIU Xiaolong et al. Citations: 2
Sensor calibration and sensor calibration detection
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 25
System and method for emergency braking
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 8
Systems, methods, and devices for driving control
Published in: Patent Office Authors: Deepak Dasalukunte et al. Citations: 34
Technology to generalize safe driving experiences for automated vehicle behavior prediction
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 9
Trusted lightweight communication in cloud robotics
Published in: Patent Office Authors: Amr Mokhtar, Hassnaa Moustafa, Ignacio J Alvarez Citations: 0
Affordance-aware, multi-resolution, free-form object manipulation planning
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 1
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 0
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 0
Device and method for route planning
Published in: Patent Office Authors: Yuqing Hou et al. Citations: 1
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 0
Geographic heat or cold distribution model
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 0
High dynamic range imaging using external light source
Published in: Patent Office Authors: Michael Paulitsch et al. Citations: 0
Methods and apparatus to generate acceptability criteria for autonomous systems plans
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Methods and Tools for the Engineering and Assurance of Safe Autonomous Systems (Dagstuhl Seminar 24151)
Published in: Dagstuhl Reports Authors: Elena Troubitsyna et al. Citations: 0
Methods, apparatus, systems and articles of manufacture for providing query selection systems
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 0
Liuyang Yang et al.
No venue listed (2024)
Neural network verification based on cognitive trajectories
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Personalized mobility as a service
Published in: Patent Office Authors: Nesreen K Ahmed et al. Citations: 1
Robotic manipulation planning based on probalistic elastoplastic deformation material point method
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Robust multimodal sensor fusion for autonomous driving vehicles
Published in: Patent Office Authors: Nilesh Ahuja et al. Citations: 1
Safety system for a vehicle
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 0
Scalable Digital Twin Services for intelligent transport systems (ITS) with Optimized Communication and Dynamic Resource Adaptation
Published in: Patent Office Authors: Ned M Smith et al. Citations: 0
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 0
Systems and methods for intrusion detection in vehicle systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 12
Time of flight distance determinations
Published in: Patent Office Authors: Shabbir Ahmed et al. Citations: 0
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Blind spot based risk assessment of road maneuvers
Published in: Patent Office Authors: Rafael Rosales, Ignacio J Alvarez, Michael Paulitsch Citations: 0
Generation of spatial sound signal from auditory perspective of individual
Published in: Patent Office Authors: Rafael Rosales, Ignacio Alvarez, Willem Beltman Citations: 0
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 5
Maneuver coordination service in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 31
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 0
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Safe and scalable model for culturally sensitive driving by automated vehicles
Published in: Patent Office Authors: John Weast et al. Citations: 0
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems and methods for vehicle-occupancy-based and user-preference-based smart routing and autonomous volumetric-occupancy measurement
Published in: Patent Office Authors: Francesc Guim Bernat et al. Citations: 0
This is an item in your portfolio. It can be have images or nice text. If you name the file .md, it will be parsed as markdown. If you name the file .html, it will be parsed as HTML.
Published in Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2010
Manuals were designed to provide support and information about the usage and maintenance of the vehicle. In many cases user’s manuals are the driver’s only guidance. However, lack of clarity and efficiency of manuals lead to user dissatisfaction. In vehicles this problem is even more crucial given that driving a motor vehicle is, for many people, the most complex and potentially dangerous task they will perform during their lifetime. In this paper we present a voice interfaced driver manual that can potentially fix the deficiencies of its alternatives. In addition we aim to provide a case for the integration of such technology in a vehicle to reduce driver distraction, increase driver satisfaction, and manual usability, while also benefiting Original Equipment Manufacturers (OEMs) in lowering costs and reducing the documentation process.
Published in ‘International Journal of Learning Technology’, 2011
This paper investigates the benefits of learning from educational video games compared to learning by reading from a text document. The participants were exposed to Lewis and Clark expedition via a video game or text document. During the learning task, playing the game or reading, participants wore a Brain Computer Interface (BCI) device to gather their level of engagement. After the learning sessions, post-experiment questionnaires were used to assess the amount of information retained after each session. The results of this study suggests that the educational video games might not be significantly engaging, and also that learning by reading a handout may be better for retaining information. Furthermore, this paper briefly discusses the BCI device, and how it can be used to measure engagement of the participants.
Published in ‘Proceedings of AutomotiveUI 2011’, ACM 2011
Natural user interfaces by means of gesture and speech interaction have become a hot topic in research as well as already for real products. Most use cases currently center around consumer electronics devices like smart phones, TV sets, gaming, or other large screens like tabletops. Motivated by the latest results in those areas, our vision is to apply natural user interfaces like gesture and speech interaction to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand allow to design new experiences for operating infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in Adjunct Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2011
The current growth of automotive electronics aims toextend vehicle functionality and information access. Thispaper explores the application of Natural Voice UserInterfaces as a preferred interaction modality with in-vehicle technologies to lower driver distraction effects andimprove the user experience. The benefits and risks ofnatural speech interactions are evaluated in order topropose a driver-centric design guideline based on previousresearch. The paper concludes that driving scenarios canprofit considerably from systems that apply natural speechinterfaces to allow the driver to access information.
Published in Proceedings of Interact 2011, 2011
Voice-interfaced, in-vehicle assistance includes receiving a Voice-based query from a user in the vehicle, and then determining at least one of a user emotional state, user expertise level and speech recognition confidence level associated with the Voice-based query. A text-based query may then be derived from the Voice-based query, and used to search a help database for answers corresponding to the Voice-based query. At least one response is then provided to the user in the form of Voice-based assistance in accordance with at least one of the user emotional state, user expertise level and speech recognition confidence level.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces, ACM 2012
Natural user interfaces—generally based on gesture and speech interaction—are an increasingly hot topic in research and are already being applied in a multitude of commercial products. Most use cases currently involve consumer electronics devices like smart phones, tablets, TV sets, game consoles, or large-screen tabletop computers.Motivated by the latest results in those areas, our vision is to apply natural user interfaces, for example gesture and conversational speech interaction, to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand might allow the design of new user experiences for infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces and to continue the fruitful discussions held at the 1st Workshop on Automotive Natural User Interfaces from AutomotiveUI ’11 in Salzburg, Austria. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in EHU Scientific Production Portal, EHU 2012
This thesis presents the design and development of the Conversational Automotive Assistant, Voice User Help, a conversational system based on the question-answer paradigm and designed to consult vehicle documentation while driving. This work compiles research in the fields of technical documentation, information retrieval, natural language processing, vehicle user interface design, user experience, and affective computing with the goal of creating an adaptive and dynamic assistant that modifies its conversational behavior depending on the user’s emotional state.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 2012)’, 2012
Automotive Natural User Interfaces have the potential to increase user experience providing intuitive interactions for drivers. However, in the complex setting of a driving vehicle, failed interactions with in-vehicle technology can lead to frustration and put drivers in a dangerous situation. This paper evaluates the possibility of applying emotion recognition to vehicular spoken dialogue systems in order to adapt the dialog strategies, in error recovery scenarios. An emotional taxonomy is developed for the interactions with a conversational vehicular application, the Voice User Help. The positive results of the performance of VUH emotion recognizer support the creation of real-time classification of the user emotional state, which serves as basis to emotional reappraisal dialog strategies that mitigate negative effects on the driver’s cognitive load and driver performance.
Published in Journal of Ergonomics, Taylor & Francis Online 2012
The use of brain computer interface (BCI) devices in research and applications has exploded in recent years. Applications such as lie detectors that use functional magnetic resonance imaging (fMRI) to video games controlled using electroencephalography (EEG) are currently in use. These developments, coupled with the emergence of inexpensive commercial BCI headsets, such as the Emotiv EPOC ( http://emotiv.com/index.php) and the Neurosky MindWave, have also highlighted the need of performing basic ergonomics research since such devices have usability issues, such as comfort during prolonged use, and reduced performance for individuals with common physical attributes, such as long or coarse hair. This paper examines the feasibility of using consumer BCIs in scientific research. In particular, we compare user comfort, experiment preparation time, signal reliability and ease of use in light of individual differences among subjects for two commercially available hardware devices, the Emotiv EPOC and the Neurosky MindWave. Based on these results, we suggest some basic considerations for selecting a commercial BCI for research and experimentation.
Statement of Relevance: Despite increased usage, few studies have examined the usability of commercial BCI hardware. This study assesses usability and experimentation factors of two commercial BCI models, for the purpose of creating basic guidelines for increased usability. Finding that more sensors can be less comfortable and accurate than devices with fewer sensors.
Published in Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Springer 2012
The rapid advancement of vehicular technologies has resulted in an exponential increase of new vehicle functions road assistance and connected vehicles services. Vehicle manuals are designed to provide support and information about the use and maintenance of these features. However, current vehicle user manuals do not allow looking for information under driving conditions. This paper presents the Voice User Help, a smart voice-operated system that utilizes natural language understanding and emotional adaptive interfaces to assist drivers when looking for vehicle information with minimal effect on their driving performance. Additionally, the system presents an opportunity for elder drivers to reduce the learning curve of new in-vehicle technologies and improve efficiency. Results on user acceptance of the Voice User Help, as well as cognitive load and driver distraction effects generated during a simulated drive indicate that the Voice User help is an extremely desirable feature and potentially safe application since it did not significantly decrement driving performance. Furthermore preliminary results on adaptive voice interfaces using emotion recognition indicate that personalization of the interaction will be able to palliate possible negative effects that happen during system error recovery.
Published in Jouarnal or Ergonomics, Taylor & Francis 2012
Abstract not available
Not available
Published in ‘Proceedings of AutomotiveUI 2014’, 2014
A major challenge in the future of traffic is to understand how “socially-aware vehicles” could be making use of their social habitus, formed by any information that can be inferred from past and present social relations, social interactions, and a driver’s social state when exposed to other participants in real, live traffic. The aim of this workshop in recognition of this challenge is to advance on a common understanding of the symbiosis between drivers, cars, and the infrastructure. The central objective of the workshop is to provoke an active debate on the adequacy of the concept of social, natural, and peripheral interaction, addressing questions such as “who can communicate what”, “when”, “how”, and “why”? To tackle these questions, we would like to collect different, radical, innovative, versatile, and engaging works that challenge or re-imagine human interactions in the near future automobile space.
Published in ‘Pervasive and Mobile Computing’, 2014
Research on next generation automotive ICT is challenged by the complex interactions of technological advancements and the social nature of individuals using and adopting technology. Traffic in the future will no longer be considered as a network of individually behaving “dumb” cars, but rather as the entirety of social interactions between its entities. Successful application of collective, socially inspired driving mechanisms requires to understand how socially-inspired vehicles (i.e., driver-car pairs) could make use of their social habitus, composed from (past and present) driving behavior, social interactions with pedestrians, vehicles, infrastructure, etc., and drivers’ vital states when exposed to other road participants in live traffic. In response to this emerging research direction, the aim of this workshop is to achieve a common understanding of the symbiosis between drivers, cars, and infrastructure from a global point of view (referred to as “collective driving”). In particular, this workshop is expected to provoke an active debate on the adequacy of the concept of socializing cars, addressing questions such as who can communicate what, when, how, and why?
Published in ‘International journal of human-computer studies’, Elsevier 2015
The growing advancements of in-vehicle electronics and the intrusion of consumer electronics in the vehicle cockpit have increased the complexity of in-car experiences. Therefore, vehicle manuals are needed, now more than ever, to provide information and guidance. Automakers have extended user assistance through multimedia, integrated manuals, online services and telephonic assistance. However, no driver-centric interfaces have been created to provide vehicle documentation assistance effectively. Drivers are expected to interrupt the driving experience in order to find vehicle information in a paper manual. This paper compares the effects on driving performance and cognitive load when consulting a manual in a simulated driving environment through various conditions. These conditions consist of interacting with a voice activated vehicle manual called the Voice User Help, an on-board multimedia manual, a passenger, and a call center. Results suggest that any kind of interaction to access information while driving has an impact on the driver׳s attention based on a decrease in driving performance and increase of cognitive load. However, amongst all modalities, voice interfaces seem to be the better option for consulting information while driving. Also, and under some circumstances, interaction with a conversational manual system appears to be safer than human-to-human communication.
Published in ‘Extended Proceedings of the 7th International Conference on Automotive User’, 2015
This paper outlines and evaluates experiential prototyping for emerging vehicle UX design within a pedagogical framework. Drawing from studio experience, we discuss the learnings, options and risks that in-vehicle UX designers face in prototyping realtime, adaptive user interfaces, and suggest methods and solutions for designers wishing to expand their creative practice.
Published in ‘Adjunct Proceedings AutomotiveUI ’15’, ACM 2015
As driving is mainly a visual task, auditory displays play a critical role for in-vehicle interactions. To improve invehicle auditory interactions to the advanced level, auditory display researchers and automotive user interface researchers came together to discuss this timely topic at an in-vehicle auditory interactions workshop at the International Conference on Auditory Display (ICAD). The present paper reports discussion outcomes from the workshop for more discussions at the AutoUI conference.
Published in ‘AutomotiveUI 2015’, 2015
The search term “driver-vehicle interaction study” results in 2,690 Google Scholar hits of research papers published in the past 5 years (2010-2015). This huge number clearly points out the problem that researchers (particularly, new to this field) are exposed to, namely that many decisions regarding the setting, (e.g., lab/field, low-/high-fidelity simulator, within/between subjects, sample size, biased subject, learning effect, sensor technology, mobile hardware, synchronization issues, briefing, etc.) have to be established early in the design phase without the reference of principled guidelines and best practices to support the min identifying the optimal solution to answer their research question of interest. This workshop invites a) people activein the field to share their experiences in executing studies to measure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draft research questions, present their problems, and discuss possible solutions with the other participants.
Published in Proceedings of Automotive UI 2015, ACM 2015
A major challenge in today’s as well as future driving is to keep drivers informed about the vehicle’s state and the environment. Today’s assistant and infotainment systems compete for the drivers’ attention and may even distract them from the primary driving task. Further, with an increase in automation, the vehicle needs to be able to communicate information with different urgency levels. While some information are not important and should never distract a driver from important tasks, there are also calls for action, which a driver should not be able to ignore. We believe in adaptive ambient displays and peripheral interaction as one possible way to unobtrusively present information while being able to switch the driver’s attention if needed. In this workshop the focus lies in exchange of best known methods and discussion on challenges and potentials for this kind of interaction in today’s scenarios as well as in future mixed or full autonomous traffic. The central objective of this workshop is to bring together researchers from different domains and discuss radical, innovative, and engaging ideas and a future landscape for research in this area.
Published in Proceedings of Automotive UI 2015, ACM 2015
The search term “driver-vehicle interaction study” results in2,690 Google Scholar hits of research papers published inthe past 5 years (2010-2015). This huge number clearlypoints out the problem that researchers (particularly, new tothis field) are exposed to, namely that many decisionsregarding the setting, (e.g., lab/field, low-/high-fidelitysimulator, within/between subjects, sample size, biasedsubject, learning effect, sensor technology, mobilehardware, synchronization issues, briefing, etc.) have to beestablished early in the design phase without the referenceof principled guidelines and best practices to support themin identifying the optimal solution to answer their researchquestion of interest. This workshop invites a) people activein the field to share their experiences in executing studies tomeasure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draftresearch questions, present their problems, and discusspossible solutions with the other participants.
Published in * Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications*, ACM 2016
On July 1st 2016, the first automated vehicle fatality became headline news [9] and caused a nationwide wave of concern. Now we have at least one situation in which a controlled automated vehicle system failed to detect a life threatening situation. The question still remains: How can an autonomous system make ethical decisions that involve human lives? Control negotiation strategies require prior encoding of ethical conventions into decision making algorithms, which is not at all an easy task – especially considering that actually coming up with ethically sound decision strategies in the first place is often very difficult, even for human agents. This workshop seeks to provide a forum for experts across different backgrounds to voice and formalize the ethical aspects of automotive user interfaces in the context of automated driving. The goal is to derive working principles that will guide shared decision-making between human drivers and their automated vehicles.
Published in Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2016
This workshop will focus on the problem of occupant and vehicle situational awareness with respect to automated vehicles when the driver must take over control. It will explore the future of fully automated and mixed traffic situations where vehicles are assumed to be operating at level 3 or above. In this case, all critical driving functions will be handled by the vehicle with the possibility of transitions between manual and automated driving modes at any time. This creates a driver environment where, unlike manual driving, there is no direct intrinsic motivation for the driver to be aware of the traffic situation at all times. Therefore, it is highly likely that when such a transition occurs, the driver will not be able to transition either safely or within an appropriate period of time. This workshop will address this challenge by inviting experts and practitioners from the automotive and related domains to explore concepts and solutions to increase, maintain and transfer situational awareness in semi-automated vehicles.
Published in Dagstuhl Reports, Dagtsuhl 2016
The next big change in the automotive domain will be the move towards automated and semi-automated driving. We can expect an increasing level of autonomous driving in the coming years, resulting in new opportunities for the car as an infotainment platform when standard driving tasks will be automated. This change also comes with a number of challenges to automotive user interfaces. Core challenges for the assistance system and the user interface will be distributing tasks between the assistance system and the driver, the re-engagement of drivers in semi-automated driving back to the driving task, and collaborative driving in which cars collectively work together (e.g., platoons). Overall, in the coming years we will need to design interfaces and applications that make driving safe while enabling communication, work, and play in human-operated vehicles. This Dagstuhl seminar brought together researchers from human computer interaction, cognitive psychology, human factors psychology and also from automotive industry and OEMs to discuss the new interface paradigms for (semi-)automated driving.
Published in ‘Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’16)’, ACM 2016
Automotive user experiences can be increasingly personalized and adaptive thanks to advances in in-vehicle sensors and user modelling but current automotive software development frameworks still require large software development efforts to create custom interaction solutions. In this paper we propose a novel system architecture aimed at supporting automotive researchers and designers by simplifying the prototyping process towards novel adaptive user interfaces. We describe the integration of RealSense sensors and the Context Sensing SDK with the Skyline driving simulator framework. The combination of these tools allows rapid prototyping of in-cabin context aware interactions. The paper presents two use cases of in-cabin-aware prototypes, a user profile loading interface that recognizes identities and occupant roles and an L4 to L3 take-over control interface using RealSense and Context sensing APIs to detect in-vehicle events and Skyline to present real-time adaptive warning interfaces. The resulting experiences are core components of an intelligent ADAS framework for research of IVI personalization and highly automated collaborative driving.
Published in ‘Proceeding of Automotive UI 2017’, ACM 2017
Abstract not yet available.
Published in ‘Automotive user interfaces: creating interactive experiences in the car’, 2017
Given the rapid advancement of technologies in the automotive domain, driver–vehicle interaction has recently become more and more complicated. The amount of research applied to the vehicle cockpit is increasing, with the advent of (highly) automated driving, as the range of interaction that is possible in a driving vehicle expands. However, as opportunities increase, so does the number of challenges that automotive user experience designers and researchers will face. This chapter focuses on the instrumentation of sensing and displaying techniques and technologies to make better user experience while driving. In the driver–vehicle interaction loop, the vehicle can sense driver states, analyze, estimate, and model the data, and then display it through the appropriate channels for intervention purposes. To improve the interaction, a huge number of new/affordable sensing (EEG, fNIRS, IR imaging) and feedback (head-up displays, auditory feedback, tactile arrays, etc.) techniques have been introduced. However, little research has attempted to investigate this area in a systematic way. This chapter provides an overview of recent advances of input and output modalities to be used for timely, appropriate driver–vehicle interaction. After outlining relevant background, we provide information on the best-known practices for input and output modalities based on the exchange results from the workshop on practical experiences for measuring and modeling drivers and driver–vehicle interactions at AutomotiveUI 2015. This chapter can help answer research questions on how to instrument a driving simulator or realistic study to gather data and how to place interaction outputs to enable appropriate driver interactions.
Published in ‘International Journal of Mobile Human Computer Interaction (IJMHCI)’, 2017
This paper describes the research and development process of an in-vehicle user experience using Skyline, an automotive prototyping platform created in Intel Labs to empower interaction designers and user experience researches to rapidly and iteratively develop and test in-vehicle user experience concepts. The paper describes the hardware and software components of Skyline in depth and how to configure them to suit individual researcher needs. The paper also presents a case study to exemplify the design making process that Skyline enables. From ideation to use-case creation, prototyping and validation through user assessment, the paper showcases the benefits of capturing early qualitative user feedback as support for rapid prototyping walking through a study titled Agency vs. Control and the associated interactions inside the cockpit. Ten defined use-cases are developed and integrated into a hero scenario in Skyline. High fidelity HMI concepts are tested and validated over the course of six months with feedback from a total of fifty users.
Published in ‘Springer Nature Advances in Human Aspects of Transportation’, Springer 2017
Advancements of in-vehicle technologies and the development of mobile applications that keep a driver connected in a driving environment have caused an increasingly dangerous safety concern. Distracted driving has gained the attention of legislators and governments globally. Countries have constituted bans that partially or fully forbid drivers from using gadgets while driving, especially hindering out-of-the-vehicle communications. This paper introduces Voiceing™, a voice-activated application meant to improve social communications in the car, serving as a safe alternative to distracted driving. Other modalities of interaction such as texting, in-vehicle conversations and outside-of-the-vehicle conversation have been measured and compared with Voiceing™ investigating effects on driver’s performance, cognitive load and user acceptance. Results from this study suggest that Voiceing™ is a safer alternative than in-vehicle interactions with humans. Results also show that natural speech interaction of in-vehicle applications and the inclusion of context awareness help improve driving performance while interacting with a vehicle system.
Published in Automotive User Interfaces: Creating Interactive Experiences in the Car, Springer Book, Springer 2017
In-vehicle experiences are made up mainly of mundane small moments, repeated practices, and taken-for-granted decisions that make up daily experiences in and around private passenger vehicles. Understanding what those experiences are for drivers around the world presents an opportunity for designing novel interactive experiences, technologies, and user interfaces for vehicles. In this chapter, we present a set of tools, methodologies, and practices that will help reader create a holistic design space for future mobility. Transitioning between ethnography, insights, prototyping, experience design, and requirements decomposition is a challenging task even for experienced UX professionals. This chapter provides guidance in this matter with practical examples.
Published in ‘Automotive User Interfaces: Creating Interactive Experiences in the Car’, ACM 2017
Informing a driver of a vehicle’s changing state and environment is a major challenge that grows with the introduction of in-vehicle assistant and infotainment systems. Even in the age of automation, the human will need to be in the loop for monitoring, taking over control, or making decisions. In these cases, poorly designed systems could lead to needless attentional demands imparted on the driver, taking it away from the primary driving task. Existing systems are offering simple and often unspecific alerts, leaving the human with the demanding task of identifying, localizing, and understanding the problem. Ideally, such systems should communicate information in a way that conveys its relevance and urgency. Specifically, information useful to promote driver safety should be conveyed as effective calls for action, while information not pertaining to safety (therefore less important) should be conveyed in ways that do not jeopardize driver attention. Adaptive ambient displays and peripheral interactions have the potential to provide superior solutions and could serve to unobtrusively present information, to shift the driver’s attention according to changing task demands, or enable a driver to react without losing the focus on the primary task. In order to build a common understanding across researchers and practitioners from different fields, we held a Workshop on Adaptive Ambient In-Vehicle Displays and Interactions at the AutomotiveUI`15 conference. In this chapter, we discuss the outcomes of this workshop, provide examples of possible applications now or in the future and conclude with challenges in developing or using adaptive ambient interactions.
Published in Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2017
Automated driving systems (ADS) are mainly regarded from an innovation and technology-centered perspective. In academia, as well as in industry, there is a concentration on technical issues to maintain competitiveness while aspects like acceptance, trust and user experience are widely under-researched. However, the “human factor” is critical for a comprehensive establishment of ADS technology on the market. We believe that there is a need to focus on a user-centered design (UCD) perspective to bring ADS innovation to a next level and to achieve a wide acceptance in society. In this workshop we want to discuss special requirements of UCD applied to ADS, to address challenges and opportunities and to reveal new research fields for future work.
Published in ‘Springer Natural Digital Human Modelling’, Springer 2018
As development of automated vehicles and adoption of electric vehicles continue to grow, there is an increasing interest in the public opinions on these technologies. We conducted an international online survey to gather information about people’s hopes and concerns for automated and electric vehicles from a total of 866 people from four countries – Austria, Germany, South Korea, and USA. Results revealed some differences across countries in the perceptions of automated and electric vehicles. However, differences between the same countries have shrunk compared to our previous survey completed in 2012. Results are discussed with limitations and future work.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18)’, ACM 2018
Augmented reality (AR) has the potential to improve road safety, support more immersive (non-) driving related activities, and finally enhance driving experience. AR may also be the enabling technology to help on the transition towards automated driving. However, augmented reality still faces a number of technical challenges when applied in vehicles, and also several human factors issues need to be solved. In this workshop, we will discuss potential and constraints as well as impact, role, and adequacy of AR in driving applications. The primary goal of this workshop is to define a research agenda for the use of AR in intelligent vehicles within the next 3 to 5 years.
Published in ‘Automotive UI 2018’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications AutomotiveUI 2018’, ACM 2018
In-car emotion detection and regulation have become an emerging and important branch of research within the automotive domain. Different emotional states can greatly influence human driving performance and user experience both in manual and automated driving conditions. The monitoring and regulation of relevant emotional states is therefore important to avoid critical driving scenarios with the human driver being in charge, and to ensure comfort and acceptance in autonomous driving. In this workshop we want to discuss the empathic user interface research to address challenges and opportunities and to reveal new research directions for future work. This workshop provides a forum for exchange and discussion on empathic user interfaces, including methods for emotion recognition and regulation, empathic automotive human-machine interaction design, user evaluation and measurements, and subsequent improvement of autonomous driving experience.
Published in Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), IEEE 2018
Current automated driving systems assume drivers continuously monitor the vehicle. Meanwhile, fully automated vehicles aim at not requiring human intervention for their safely operation. The industry is currently debating how these novel systems can be certified under functional safety standards. In this paper, we argue that the current safety picture is not comprehensive enough, since it alienates users. We propose experiential safety as a complement to existing functional safety and to develop a framework for experiential safety interactions between the user and automation in automated driving environments. To support the experiential safety design model, we provide an overview of the user-centered research on experiential automation safety, which includes results from online surveys, personal interviews, and gamified group workshops. We explore current user behaviors by focusing on what makes them feel safe as drivers and passengers, and how unexpected events and automation responses might impact their perception of safety. Among the highlighted results, we show how mismatched expectations and unexpected behaviors from autonomous vehicles can lead to frustration and compromised trust. We also show how automation feedback to the user can generate stress and anxiety if not properly configured and how a cooperative relationship between automation and the driver leads to more satisfying driving experiences. Finally, we present guidelines for the experiential safety to be applied by automotive engineers and designers in their development of automated driving technologies.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
We foresee conversational driver assistants playing a crucial role in automated driving interactions. In this video we present a study of user interactions with an in-vehicle agent, “Theo”, under SAE Level 4 automated driving. We use a remote Wizard-of-Oz setup where participants, sitting in a driving simulator, experience real-life video footage transmitted from a vehicle in the neighborhood and interact with Theo to instruct the vehicle where to go. We configured Theo to present 3 levels of conversational abilities (terse, verbose and helpful). We show the results of 9 participants tasked to negotiate destinations and route changes. Voice interaction was reported as preferred means of communication with Theo. There was a clear preference for talkative assistants which were perceived more responsive and intelligent. We highlight challenging interactions for users such as vehicle maneuvers in parking areas and specifying drop off points and interesting associations between the agent performance and the automated vehicle abilities.
Published in Proceedings of the 13th IEEE International Conference on Automatic Face & Gesture Recognition, IEEE 2018
Automated driving has the potential to reduce the amount of fatal crashes, lighten the burden of commutes, and democratize mobility access to wider populations. But delegation of control to automation is not without issues. One of the foreseen drawbacks is that users might experience negative emotional reactions to unanticipated or unexplainable automated maneuvers. In this paper we present a novel method to induce targeted emotional reactions, frustration and startle, in simulated automated driving environments. We describe the data collection process for 17 driver - passenger dyads and discuss the data labelling method for generating reliable novel emotion datasets. This contribution is a foundational methodology towards expanding emotional understanding in automated vehicles, a critical skill for building long-term trusted experiences.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
Automated driving systems (ADS), especially in higher levels of automation, seem to be the new focus of innovation regarding future mobility. Technological achievements of traveling automation open up new challenges for road traffic. Existing automotive research focuses on problem solving and observational approaches including users and their imagination of the future of mobility to analyze acceptance and user experience of “incremental” (step-wised improved) innovations. On the other hand, “radical” (something new, enabled by technology or meaning change) innovations extensively increase product quality leaping over incremental innovation. This workshop aims to challenge the current research approaches to automated driving against “trying to improve sitting in a horse carriage” and discuss how we can design “radical” innovations for ADS beyond the “horse carriage”. Within this interactive workshop, we will utilize a design thinking approach to refocus on underlying problems that ADSs originally aim to solve and generate ideas for radical innovations.
Published in Proceedings of the 2019 International Conference on Intelligent Transportation Systems (ITSC), IEEE 2019
The scientific knowledge and tools for the mass deployment of Automated Vehicles (AVs) are maturing rapidly, as evidenced by the wide deployment of AV test fleets worldwide. These vehicles have the potential to produce tremendous economic and societal benefits including greatly reduced traffic accidents, injuries, and congestion, and to make less expensive, more flexible and more productive transportation available to all. But one challenge looms above all others in the race to full vehicle automation; solving the AV Safety Assurance challenge. Automated transportation is not just a product, but an industry. And it is as an industry that we must together solve this challenge. We invite researchers, automakers, technology companies, and government regulators to come together to develop a holistic model to define and measure AV Safety. In this special session we present papers that provide contributions to the definition, applicability and standardization of AV safety assurance, including methods for the development of metrics, benchmarks and evangelisation of AV Safety Assurances to users and the public. This session continues the open discussion started in 2018 ITSC with the goal of making AV Safety a reality. The session will consist of high quality paper presentations as well as a panel discussion with some of the most relevant figures of the AV industry.
Published in ‘IEEE Intelligent Transportation Systems Conference’, IEEE 2019
The recent trend of integrating vehicular communications with advanced sensors installed on vehicles, enables Connected and Autonomous Vehicles (CAVs) to share their own driving information as well as perception information, such as a list of perceived objects (e.g., dynamic obstacles such as vehicles, pedestrians, and cyclists, and static obstacles). This has the potential to improve driving safety by expanding collective perception of vehicles. However, adversaries may also populate false information to other Connected Vehicles (CVs) via Vehicle-to-Vehicle (V2V) communications. This paper investigates the security aspects of mixed deployment of CAVs, CVs and legacy vehicles, and in particular with regards to misbehavior detection. We provide a generic design framework that is independent from the specific algorithms of the underlying perception system, and can be used to implement a practical Misbehavior Detection System (MDS). We analyze the MDS framework w.r.t. a ghost vehicle attack. While no computing system can be completely secure, we believe this work would help the industry to develop a practical MDS design within a common framework while allowing individual techniques to mature and evolve over time with future academic research.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in Proceedings of 2019 IEEE Intelligent Transportation Systems Conference (ITSC), IEEE 2023
Advances in vehicular communication technologies have made Connected Vehicles (CVs) a near-term reality. Compared to models where vehicles rely solely on their own perception to sense and make decision on the environment, CVs have the potential to allow information sharing among vehicles to improve sensing and decision making collectively. A first concrete step towards this goal is enabling vehicles to share perception-related information, to overcome limitations of their respective sensors (e.g., partial awareness due to occlusions). Sharing processed information vs raw sensor data has the advantage of reducing the amount of data to be transmitted, and the required computation burden at the receiver side.This paper proposes an approach to enable object-level sharing among vehicles. Following state-of-the-art object-level management techniques, we developed a two-layer architecture that handles object tracking and fusion from dynamic remote sources of information. We implemented our approach and showed that it can achieve realistic performance, and robustness both in terms of quality of information and computation.
Published in ‘Proceedings of the IEEE International Conference in Intelligent Transportations Systems 2019’, IEEE 2019
To study naturalistic in-cabin emotion we developed SKYNIVI, a modified open source driving simulator, with scenarios designed to elicit startle and frustration. We target generating these emotions because we believe that by detecting these it will be possible for autonomous vehicles to learn to drive better. We show how to use SKYNIVI to develop datasets that capture naturalistic emotions in drivers and passengers for algorithmic development. We recruited 51 participants as dyads and single drivers to participate in two different scenarios. We show that we were able to evoke hundreds of instances of our target emotions in this cohort and present an analysis of factors we found to impact emotional expression including: scenario design , demographic factors, personality and baseline affect . We find that having a second person in the vehicle impacts observed expressions of emotion even when no difference in baseline affect is reported.
Published in ‘Proceedings of the IEEE Intelligent Vehicle Symposium 2019’, IEEE 2019
The need for safety in Automated Driving (AD) is becoming increasingly critical with the accelerating deployment of this technology. Beyond functional safety, industry must guarantee the operational safety of automated vehicles. Towards that end, Mobileye introduced the Responsibility Sensitive Safety (RSS), a model-based approach to Safety [1]. In this paper we expand upon this work introducing the C++ Library for Responsibility Sensitive Safety, an open source executable that implements a subset of RSS. We provide architectural details to integrate the C++ Library for Responsibility Sensitive Safety with AD Software pipelines as safety module overseeing decision making of driving policies. We illustrate this application with an example integration with the Baidu Apollo AD stack and simulator, [2] and [3], that provides safety validation of the planning module. Furthermore, we show how the C++ Library for Responsibility Sensitive Safety can be used to explore the usefulness of the RSS model through parameter exploration and analysis on minimum safe longitudinal distance, (dmin), considering different weather conditions. We also compare these results with half-of-speed rule followed in some parts of the world. We expect that the C++ Library for Responsibility Sensitive Safety becomes a critical component of future tools for formal verification, testing and validation of AD safety and that it helps bootstrap the AD research efforts towards standardization of safety.
Published in ‘Transportation research interdisciplinary perspectives’, 2020
This paper provides a framework for examining human-vehicle interactions with respect to three dimensions that can involve models or simulations: the agents, the environments, and the scenarios. Agents are considered on a spectrum from human to artificial actors. Environments are considered on a spectrum from simulated to real. Scenarios are considered on a spectrum from constrained to unconstrained. It is argued that these three dimensions capture key differences in research approaches within the field of human-vehicle interaction, and that explicitly situating research and discussions within this framework will allow researchers to better compare and contrast research outcomes and contributions. The framework is used to locate different disciplines in the community with respect to one another, and to identify areas which are as-yet unexplored.
Published in ACM IX Interaction Journal, 2020
ACM SIGCHI Auto-UI is a growing community, but one in which some continents were less involved than expected and hoped for. For the 2019 conference in Utrecht, the Netherlands, we made various targeted attempts to grow and diversify our international community, with support from the ACM SIGCHI Development Fund. Our efforts resulted in a growth in the number of Asian participants, which made up almost 20 percent of the attendees. In this blog, we briefly reflect on our initiatives and on a panel discussion focusing on research topics that matter more globally to the Auto-UI field.
Published in ‘Proceedings of 12th International Conference in Automotive User Interfaces and Interactive Vehicular Applications’, 2020
Driver performance and behavior can be partially predicated based on one’s emotional state. Through ascertaining the emotional state of passengers and employing various mitigation strategies, empathic cars can show potential in improving user experience and driving performance. Challenges remain in the implementation of such strategies, as individual differences play a large role in mediating the effect of affective intervention. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of targeted emotion intervention methods. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this short workshop, researchers will determine ideal intervention methods for prospective user groups. This will be achieved through the method of insight combination to generate and discuss ideas.
Published in In proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, IEEE 2020.
Safety is an important challenge in the development of automated vehicles (AVs). To help with the challenge of achieving higher safety in the decision making of AVs, Intel and Mobileye have proposed a parameterized model named Responsibility-Sensitive Safety (RSS). Previous studies have demonstrated that RSS has the potential to improve the safety performance of automated vehicles. However, RSS could lead to a considerable car-following distance depending on the parameter values chosen for the model, which could reduce traffic efficiency. To improve the efficiency of RSS applied to Adaptive Cruise Control (ACC) systems, previous work proposed an efficiency-optimal (referred as “Efficiency-optimal RSS”) variation of the RSS model that involves different triggering conditions of a proper response. Therefore, in this paper a human-in-the-loop driving simulation experiment was conducted to evaluate the performance and acceptance of different safety methods. The RSS model and the efficiencyoptimal variant were embedded in an ACC system based on Model Predictive Control (MPC) algorithm. Two car-following scenarios with a sudden deceleration of lead vehicle at various time headways were simulated to evaluate the human perception and response of the different models. Results show that the original RSS model improves subjective safety judgment of human drivers. While the Efficiency-optimal RSS variant has a lower subjective safety score when compared to original RSS, it significantly reduces driver’s emergency braking reactions when compare to an ACC only system.
Published in Proceedings of IEEE Intelligent Vehicle Symposium 2020, IEEE 2020.
The determination of safety assurances for automated driving vehicles is one of the most critical challenges in the industry today. Several behavioral safety models for automated driving have been proposed recently and standards discussions are on the way. In this paper we present a method to automatically explore the performance of automated vehicle (AV) safety models utilizing robustness of Metric Temporal Logic (MTL) specifications as a continuous metric of safety. We present a case study of the Responsibility Sensitive Safety model (RSS), introducing a safety evaluation pipeline based on the CARLA driving simulator, RSS and a set of safety-critical driving scenarios. Our method automatically extracts safety relevant profiles for these scenarios providing practical parametric boundaries for implementation. Furthermore, we evaluate the trade-offs between safety and utility within the safe RSS parameter space through a proposed naturalistic benchmark challenge that we open-sourced. We analyze different RSS parameter configurations including assertive and more conservative settings, extracted by our specification-driven framework. Our results show that while maintaining the safety boundaries, the extracted RSS configuration for assertive driving behavior achieves the highest utility.
Published in ‘Proceedings of 2020 AAAI Conference’, AAAI 2020
Automated driving is an ML-intensive problem and its safety depends on the integrity of perception as well as planning and control. Responsibility Sensitive Safety (RSS) is a recent approach to promote safe planning and control that relies on perfect perception; however, perceptual uncertainty is always present, and this causes the possibility of misperceptions that can lead an autonomous vehicle to allow unsafe actions. In this position paper, we sketch a novel proposal for a formal model of perception coupled with RSS to help mitigate the impact of misperception by using information about perceptual uncertainty. The approach expresses uncertainty as imprecise perceptions that are consumed by RSS and cause it to limit actions to those that support safe behaviour given the perceptual uncertainty. We illustrate our approach using examples and discuss its implications and limitations.
Published in ‘Proceedings of IEEE Intelligent Transportation Systems Conference 2021’, IEEE 2021
Recently, Collective Perception Messages (CPM) that carry additional information about the surrounding environment beyond Basic Safety Messages (BSM) or Cooperative Awareness Messages (CAM) have been proposed to increase the situational awareness for Connected and Automated Vehicles (CAV) in Intelligent Transportation Systems. However, blindly trusting perception information from neighbors that cannot be locally verified is dangerous given the safety impact that erroneous or malicious information might have. This paper addresses the data trust challenge of CPMs, proposing a misbehavior detection scheme called MISO- V (Multiple Independent Sources of Observations over V2X) that leverages the inherently overlapping nature of the perception observations from multiple vehicles to verify the semantic correctness of the V2X data and improve the data trust and robustness of V2X systems. CPM-enabled CAVs are implemented and MISO-V performance is evaluated in CARLA-based simulation tool, where falsified V2X packets presenting a ghost car are injected in a suburban T-junction scenario with other cars. The results show that MISO- V is very effective in detecting the ghost car attacks and removing the impact of such misbehavior from influencing the receiver and offers a conservative and sensible approach towards trustworthy Collective Perception Services for CAVs.
Published in Proceedings of the IEEE Intelligent Vehicles Symposium (IV), IEEE 2021
The need for safety in automated driving is undisputed. Since automated vehicles are expected to reduce the number of fatalities in road traffic significantly, hundreds of millions of test kilometers would be required for statistical safety validation [1]. Physics-based safety verification approaches are promising in order to reduce this validation effort. Towards this goal, Mobileye introduced the concept of Responsibility-Sensitive Safety (RSS). In RSS, bounds for the reasonable worst-case behavior of traffic participants are assumed to be given, such as the reaction time or the maximum deceleration. These parameters have a crucial effect on the applicability of the approach: choosing conservative parameters likely hinders traffic flow, while the opposite could lead to collisions, as the assumptions are violated. Thus, in this work, we focus on finding reasonable parameters of RSS. Based on the physical limits, legal requirements and human driving behavior, we propose scopes and parameter sets that allow for a sound safety verification while not hindering traffic flow. Furthermore, we present an approach that explains seemingly frequent human drivers’ RSS violations on highways and may lead to a useful extension of RSS.
Published in ‘SAE Technical Paper’, SAE 2021
As industry races to complete technical development of automated driving systems (ADS), important questions are being raised about how to measure the safety of such systems and the overall safety of Automated Vehicles (AVs). Traffic safety engineers have for decades utilized metrics to assess the safety of human drivers and measurements such as Time To Collision (TTC) and Time Headway (THW) have proven to be a useful indicator of increased risk of an accident for human drivers. But what if we can do better with AVs? Are human driving derived risk metrics meaningful for a self-driving vehicle? Recently, the Institute for Automated Mobility (IAM) published a set of metrics defined specifically for self-driving vehicles that provide a thorough assessment of the safety of an AV. While humans must use estimation and cautious judgement to make decisions, AVs can use precise measurement techniques via sensors and correlate multiple sources of data in real time. Utilizing information such as the reaction time of the ADS, the braking capability of the AV and more, the IAM proposed metrics allow for the assessment of the safety of an AV to be accurately measured, not as a notion of approximated risk, but as a binary calculation of safety. In this paper we analyze, compare and contrast human driving, risk-oriented safety metrics with the more definitive metrics proposed for AVs. We answer important questions about the necessary evolution of human derived metrics to ensure they are meaningful in the assessment of the safety of an AV, as well as whether novel metrics proposed for AVs can be used to better understand and assess the safety performance of AVs when compared to historical safety measures. Our research proves that AV-based assessment metrics can provide better insight into the safety of both AVs and human drivers.
There is little doubt that driving generates emotional responses, whether that’s the joy of freedom, the boredom of stop-and-go traffic or anger towards unsafe maneuvers. In this chapter we provide an overview of emotion research applied to the automotive context and highlight the impact of emotional states in varying levels of driving automation. We review the most critical research findings on the impact of emotional states in driving performance including reaction time and take-over readiness. We also discuss the application of emotion regulation strategies related to the driving task. Finally, we analyze the research challenges still present for robust emotional classification and personalization in their application to in-vehicle interactions. This technology offers great potential for the development of emotionally-aware in-cabin driver assistants which will play a critical role in the future of automated driving user experience development.
Published in ‘Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, ACM 2022
Empathic in-vehicle interfaces can address driver affect and mitigate decreases in driving performance and behavior that are associated with emotional states. Empathic vehicles can detect and employ a variety of intervention modalities to change user affect and improve user experience. Challenges remain in the implementation of such strategies, as a broader established view of practical intervention modalities and strategies is still absent. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of displays and alternatives suitable to various use case situations in current and future vehicle states. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this workshop, researchers will create a design flowchart for in-vehicle affective display designers when creating displays for an empathic vehicle.
Published in ‘Proceedings of ACM’s Computer Human Interaction Conference (CHI)’, ACM 2022
Empathic vehicles are expected to improve user experience in automated vehicles and to help increase user acceptance of technology. However, little is known about potential real-world implementations and designs using empathic interfaces in vehicles with higher levels of automation. Given advances in affect detection and emotion mitigation, we conducted two workshops (N1 =24, N2 = 22, Ntotal = 46) on the design of empathic vehicles and their potential utility in a variety of applications. This paper recapitulates key opportunities in the design and application of empathetic interfaces in automated vehicles which emerged from the two workshops hosted at the ACM AutoUI conferences.
This standard applies to road vehicles. It defines a minimum set of reasonable assumptions and foreseeable scenarios that shall be considered in the development of safety related models that are part of an automated driving system (ADS). Scope: This standard applies to road vehicles. For a set of scenarios, a minimum set of assumptions regarding reasonably foreseeable behaviors of other road users are defined that shall be considered in the development of safety-related models for automated driving systems (ADS). This standard further defines a list of attributes common to contributed safety-related models and methods to help verify whether a safety-related model takes the minimum set of assumptions into consideration. An informative annex instantiates several examples of how the proposed minimum set of assumptions could be employed in ADS development. Sources of uncertainty, such as prediction or perception errors, are out of scope to this standard. This standard does not guarantee the safety of the overall system in all scenarios. Purpose: Government and Industry alike need an open, transparent, and technology-neutral standard that provides guidance useful for evaluating the performance of an ADS. This guidance consists of a minimum set of assumptions with bounds on reasonably foreseeable behaviors of other road users used in the development of safety-related models.
@ARTICLE{9761121, author={}, journal={IEEE Std 2846-2022}, title={IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems}, year={2022}, volume={}, number={}, pages={1-59}, keywords={IEEE Standards;Autonomous vehicles;Vehicle safety;Autonomous driving;Vehicle driving;Data privacy;Decision making;ADS;ADS-operated vehicle;automated driving system;assumption;automated vehicle;autonomous vehicles;AV;decision-making;IEEE 2846}, doi={10.1109/IEEESTD.2022.9761121}}
Published in Proceedings of the IEEE 2022 Winter Simulation Conference, IEEE 2023
Ensuring the safety of autonomous vehicle (AV) relies on accurate prediction of error occurrences in its perception system. Due to the inter-stage functional dependence, the error occurred at a certain stage may be propagated to the following stage and generate extra errors. To quantify the error propagation, this paper adopts the physics-based simulation, which enables fault injection at different stages of an AV perception system to generate error event data for error propagation modeling. A multi -stage Hawkes process (MSHP) is proposed to predict the error occurrences in each stage, with error propagation represented as a latent triggering mechanism. With explicitly considering the error propagation mechanism, the proposed outperforms benchmark methods in predicting error occurrence in a physics-based simulation of a multistage AV perception system. The proposed two-step likelihood-based algorithm accurately estimates the model coefficients in a numerical simulation case study.
Published in ‘MDPI Sensors’, 2022
Connected and automated driving technologies have the potential to revolutionize transportation by facilitating mobility services to a wider population, improving safety and traffic efficiency. Automated driving technology is expected to reduce the number of accidents caused by human error and avert deadly crashes, ensure mobility for all, including old and impaired individuals, allow the human driver to perform alternative (secondary) tasks, increase traffic flow efficiency, reduce fuel consumption, and lower emissions.
Driven by these goals, humankind is experiencing an exponential growth in vehicle automation taking over the monitoring of surroundings and vehicle control tasks from human drivers in a quest towards full autonomy. Connected and automated vehicles are equipped with multimodal sensors that allow continuous perception and monitoring of driving tasks to assist drivers in lower levels of SAE automation or to fully take control of driving tasks under full SAE automation. Numerous sensors, both inside and outside vehicles, allow the detection and identification of oncoming obstacles, the determination of their velocity, and the prediction of future behaviours to avoid potential collisions. Each sensor has its own strengths and weaknesses in terms of range, accuracy, energy consumption. and sensitivity towards external conditions such as weather and light. Automated vehicles usually rely on a mix of signals to improve operational reliability and robustness under the dynamic external conditions of real-world deployments. Generally, we can divide external AV sensors into two major groups: active and passive. Active sensors generate an active signal (electromagnetic or light) transmitted to the external environment to analyse its reflection (e.g., radar, lidar), whereas passive sensors just record the information from the environment (e.g., camera). Additionally, there have been advances in intelligent transportation infrastructure to monitor road users, perform predictive analytics, and facilitate collaborative perception services and remote vehicle control.
The increasing commercial availability of conditional automation (SAE level 3) and the incoming Robotaxi services (SAE Level 4) have also resulted in an increase in in-cabin monitoring sensors dedicated to monitoring driver and passenger behaviours. Multimodal in-cabin monitoring systems are crucial enablers for successfully managing automated vehicle operations. These systems enable the detection of the driver/passenger’s physiological state and activity to assess their readiness to take over control of the vehicle if required as well as to monitor their safety. Driving monitoring solutions provide information on occupants’ fatigue, distraction, discomfort, and stress. Furthermore, they can help to verify that automation is used properly by evaluating engagement in the driving monitoring task or the inherent risk of the non-driving tasks.
This Special issue aims to collect original theoretical or empirical articles on different sensing technologies, solutions, and applications for automated vehicles.
Published in Journal Name, 2023
This book is dedicated to user experience design for automated driving to address humane aspects of automated driving, e.g., workload, safety, trust, ethics, and acceptance. Automated driving has experienced a major development boost in recent years. However, most of the research and implementation has been technology-driven, rather than human-centered. The levels of automated driving have been poorly defined and inconsistently used. A variety of application scenarios and restrictions has been ambiguous. Also, it deals with human factors, design practices and methods, as well as applications, such as multimodal infotainment, virtual reality, augmented reality, and interactions in and outside users. This book aims at 1) providing engineers, designers, and practitioners with a broad overview of the state-of-the-art user experience research in automated driving to speed-up the implementation of automated vehicles and 2) helping researchers and students benefit from various perspectives and approaches to generate new research ideas and conduct more integrated research.
Published in IEEE Standards, 2022
This document presents a review of relevant literature (e.g., standards, regulations, and scientific publications) that investigated kinematic behavior of road users. This review is intended to serve as a key contribution to the Automated Driving Systems (ADS) research and industry communities, as well as to current standardization efforts, such as IEEE Std 2846, IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems.
Published in ‘2023 IEEE 26th International Conference on Intelligent Transportation Systems’, IEEE 2023
Areas of limited visibility are common in day-to-day traffic: be it static buildings, parked vehicles, traffic participants blocking the vehicle’s line of sight, harsh weather conditions or just narrow curves that impede the automated driving sensor suite to inspect the road ahead. Autonomous vehicles have to be able to safely cope with this kind of constraints. The Responsibility-Sensitive Safety model (RSS) demands vehicles to exercise caution with respect to occlusions and to consider also occluded road agents. This paper provides a concrete implementation of how occlusions in RSS can be addressed and investigates the balance between safety and usefulness of the model when a reasonably foreseeable behavior of occluded road agents is assumed. We perform occlusion experiments in urban as well as on highway scenarios with the driving simulation platform CARLA applying different parameterization of the agents kinematic properties and the safety model parameters to analyse and judge the consequences with respect to safe driving and overcautious driving behaviors.
Published in ‘Proceedings of ACM’s Automotive UI 2023’, ACM 2023
This workshop aims to design advanced empathic user interfaces for in-vehicle displays, particularly for high-level automated vehicles (SAE level 3 or higher). Incorporating model-based approaches for understanding human emotion regulation, it seeks to enhance the user-vehicle interaction. A unique aspect of this workshop is the integration of generative artificial intelligence (AI) tools in the design process. The workshop will explore generative AI’s potential in crafting contextual responses and its impact on user experience and interface design. The agenda includes brainstorming on various driving scenarios, developing emotion-oriented intervention methods, and rapid prototyping with AI tools. The anticipated outcome includes practical prototypes of affective user interfaces and insights on the role of AI in designing human-machine interactions. Through this workshop, we hope to contribute to making automated driving more accessible and enjoyable.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Empathic in-vehicle interfaces are critical in improving user safety and experiences. There has been much research on how to estimate drivers’ affective states, whereas little research has investigated intervention methods that mitigate potential impacts from the driver’s affective states on their driving performance and user experiences. To enhance the development of in-vehicle interfaces considering emotional aspects, we have organized a workshop series to gather automotive user interface experts to discuss this topic at the International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutoUI). The present paper focuses particularly on the intervention methods created by the experts and proposes design recommendations for future empathic in-vehicle interfaces. We hope this work can spark lively discussions on the importance of drivers’ affective states in their user experience of automated vehicles and pose the right direction.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Safety Assurance remains a challenge for the large-scale deployment of Automated Driving Systems (ADS). Safety models monitor the performance of the ADS. Most safety models are validated both in simulation and during on-road tests. However, first-hand experiences and analysis of ADS safety models are not easily accessible to the general research community. This paper introduces the RSS driving demonstrator an open-source simulation tool that enables first-hand experience of the Responsibility Sensitive Safety (RSS) safety model proposed by Intel and Mobileye and adopted by several Automotive Industry standards and regulatory frameworks. The RSS demonstrator enables first-hand interactions and experience of ADS safety model restrictions in both automated and manual driving conditions. As a User Experience (UX) tool, it provides quantitative safety metrics and flexible user interaction features. The results indicate it served to both evangelize the RSS ADS safety model with laymen population and is a versatile tool for Automotive UX development.
Published in ‘Adjunct Proceedings of the 16th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2024
The rapid advancement of automated vehicles has aroused the curiosity of researchers in the automotive field. Understanding the emotional aspects of this technology is critical to improving human-vehicle interactions. The topics of the proposed workshop will be expanded from internal to external empathetic interface designs of automated vehicles. The workshop will gather researchers and practitioners to brainstorm and design affective internal and external interfaces for automated vehicles, targeting specific use cases within the social context. During the workshop, participants will use an affective design tool and generative AI to prototype affective interface designs in automated vehicles. With this creative approach, we aim to expand the knowledge of affective eHMIs in addition to in-vehicle designs and understand social factors that contribute to the user perceptions of automated vehicles.
Published in ‘Transportation Research Part C: Emerging Technologies’, 2024
Ensuring the reliability of sensor-fusion-based perception systems is crucial for the safe deployment of autonomous vehicles. Such systems function through a sequence of interconnected stages, where errors in upstream stages may propagate to downstream stages and trigger additional errors. The cross-stage error propagation conceptually exists and makes errors in different stages, not independent, posing model challenges, estimation challenges, and data challenges for reliability modeling. The existing methods cannot be applied to address all these challenges. Thus, this paper presents a recursive event-triggering point process to explicitly consider the error propagation based on the simulated data. The data are simulated from a proposed error injection framework, which can generate various errors from a sequence of interconnected stages in a perception system. The latent and probabilistic error propagation information is incorporated into a modified expectation–maximization (EM) algorithm for parameter estimation. The numerical and physics-based simulation case studies demonstrate the prediction accuracy and interpretability of the proposed modeling methodology.
Published in Proceedings fo the Human Factors and Ergonomics Society Annual Meeting, 2025
The rapid development of automated vehicles offers promising avenues to enhance user experience and safety by integrating empathic in-vehicle interfaces. The report from the workshop Emotion GaRage series, held during the AutomotiveUI ’23 conference, investigates the potential of employing generative artificial intelligence (AI) to develop these empathic interfaces. Our workshop emphasized the importance of emotion recognition and regulation for passengers in driving contexts and the role of future in-vehicle empathic interfaces. Through collaborative design sessions, participants developed personalized in-vehicle agents to address drivers’ emotional states to improve safety and enjoyment. We explored insights by investigating the potential and possibilities of using generative AI in the design process. This report discusses the significance of empathic displays in facilitating the adoption of automated vehicles and explores the potential and limitations of using generative AI in the design phases.
Published in Adjunct Proceedings of the 17th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2025
This paper investigates how in-car conversational agents can support parents driving with young children—a group prone to distraction and cognitive overload. In a high-stress driving simulator study, 22 participants experienced a navigation assistant using four modalities: visual, verbal, non-verbal auditory, and haptic. Feedback was collected using a modified NASA TLX (DALI) and interviews. Verbal navigation instructions were rated most effective, reducing stress and distraction, while haptic feedback was seen as a useful secondary channel for urgent cues. Non-verbal auditory signals were largely ineffective in noisy environments. Participants favored multimodal combinations that balanced clarity with low cognitive demand. Based on these findings, we offer design recommendations for adaptive, family-aware in-car systems, emphasizing verbal communication, context sensitivity, and user customization.
I recently had the pleasure of speaking to the students of the Máster de Movilidad Cooperativa Conectada y Autónoma at Universidad Carlos III de Madrid, sharing how Generative AI is reshaping every corner of automated‑driving R&D. My session, “Challenges and Opportunities in Automated Driving in the Era of Agentic AI,” argued that these new AI models are far more than hype, they mark a genuine shift in the way we design, test, and ultimately will trust autonomous vehicles. Here are a few highlights from the talk content.
I started by defining what Generative AI means to me. I find that these terms are often overused, and end up meaning different things to different people. In my mind, Generative AI is a subset of Deep Learning, a group of algorithms that create new data rather than merely classify existing inputs. Whether through GANs, VAEs, diffusion pipelines, Transformers, or state‑space networks, these algorithms learn rich distributions of data representations from enormous data corpora and when trained, they become foundation models such as GPT‑n. Unlike hand‑coded software, they’re trained statistical models that approximate facets of human cognition. Based on the type of data they were trained we will have multiple “flavors” of foundation models with different capabilities.
So LLMs are not computer programs, they are “models”. Here is an analogy I like: if a computer program is like a recipe with precise steps, a model, is like having a chef who has learned to cook by tasting countless dishes and understanding flavor combinations. You can ask this “chef” to create new dishes based on this data-driven (learned) understanding, even if they haven’t seen that exact recipe before.
But LLMs are made of code. The “program” in this case is the architecture of the neural network and the learning algorithm, while the “model” is the resulting set of learned weights and biases within that network.
After getting our basis, I turned to the autonomous‑vehicle (AV) pipeline itself, where applications today cover the complete AV development stack. From simulation for realistic synthetic world generation as well as verification and validation, to perception problems, creating maps, predicting road user behaviors and new conversational AI assistants for passengers.
On simulation, I touched on solutions like Scenario Diffusion from Zoox that conjure complex, multi‑agent traffic scenes conditioned on HD maps and textual prompts, or UniSim by Waabi, which transforms mundane driving logs into editable, photorealistic worlds. These synthetic environments slash the expense and risk of road testing while letting engineers probe rare edge cases at scale.
On perception, I showcased DatasetGAN, an NVIDIA technique that simplifies manual labeling tasks and wiht a handful of labeled images spanws vast troves of perfectly segmented data.
One of the highlights on planning applicaitons is BehaviorGPT that impressed everyone with its ability to predict myriad plausible trajectories for every road user, capturing the uncertainty of traffic.
And as we get closer to the frontier of end‑to‑end decision making. DriveGPT4 shows how fused video perception with language‑model reasoning, can output low‑level control commands and natural‑language justifications for human consumption.
Of course, no talk is complete without a reality check. I emphasized the twin troubles of scarce, high‑quality multimodal data and the scary computational appetite of today’s large models. Achieving sub‑100‑millisecond latency for LLMs on in‑car hardware is no trivial feat. Security and safety are very real threats (think prompt‑injection attacks, IP leakage, nondeterministic outputs, and opaque reasoning) all of these challenge regulators and engineers alike.
Yet the opportunities are equally compelling. Model‑compression tricks like quantization, pruning, and distillation can turn bloated networks into nimble binaries, while neuromorphic chips such as Intel’s Loihi handle spike‑based inference with astonishing energy efficiency. Safety, too, can be engineered: binding language‑model suggestions inside a rigorously proven shell like Mobileye’s RSS keeps behaviors within an acceptable envelope, and tools like LVLM Interpret begin to open the model’s “black box,” offering visibility into why a recommendation was made.
I closed by reminding people that the march towards full autonomy is a marathon, but Generative AI has armed us with fresh answers to old questions. If we address data, performance, security, and safety head‑on, we can unlock a future of safer, more efficient, and more intelligent mobility. The technology is here to stay; our task now is to wield it ethically, safely, and wisely.
Thanks for reading! Contact me if you think the full content of this talk would be of interest to you or and audience of your choice.
—Prof. Ignacio Alvarez
I recently joined a fantastic panel titled “Embodied AI: Invisible Cues”, hosted by Dr Clare Mutzenich and Prof Saber Fallah at the University of Surrey, with guests from Fusion Processing, RIDC, Wayve, University of Leeds, and Waymo.
You can watch the full recording here on YouTube.
I decided to write a little reflection based on the conversation there.
Over the last two decades my research has been developing at the intersection of AI, Automotive Systems, and Human Factors across industry and academia. I see Embodied AI, particularly in the vehicle context, as a deeply socio-technical challenge. It’s not only about engineering autonomy but also ensuring that intelligent systems understand, and are understood, by people.
Over the last 2 decades, but specially in the lats 5 years, technology advancements in AI have produced “amazing algorithms” capable of processing complex data, generalizing well, and making useful predictions. This is fueling the rapid deployment of embodied AI globally today. Still traffic conditions and driving behavior have strong locality effects, driving on the German autobahn is different from driving in India, a highway in Ohio, US flows very differently than a highway in Sichuan, China.
Because of that, embodied AI requires richer context awareness:
These AI-based systems are rapidly scaling worldwide, from Tesla to German premium automakers and, more recently, Chinese OEMs. However, they are all making the same mistake. Design locally, deploy globally doesn’t work. We must design for diversity, validate for local needs, and ensure transparency to drive adoption.
Let me break it down and walk you through my logic.
We’re witnessing AI progressively replace classical vehicle-automation logic.
Although most production systems remain hybrid architectures (that’s AI plus deterministic model-based layers) the trend is clear. Companies like Waymo, Wayve and Mobileye are demonstrating how AI-centric stacks are now viable for real-world operation.
With AI, validation shifts from checking control logic to verifying embedded knowledge and its proper application.
Traditional Automotive verification and validation methods fall short. We need hybrid strategies that accurately measure how the model uses the knowledge embedded within and if any dangerous bias or sensitivityies have been introduced in the training data.
This is still an open problem but we need to combine at least:
I really like Fraunhofer’s work on safety processes (see the fig). But this is not a problem solvable by a single company. It requires collaborative efforts from the whole industry, including automakers, tier one suppliers, researchers, and government entities.
Even if the technology can be developed, making it cheap enough for mass adoption is challenging. Achieving widespread affordability requires both a supportive regulatory framework, incentives for companies to invest fully, and continued research on the area. There are many, many people working on these. But there is an angle that often doesn’t get proper attention. As AI-driven vehicles deploy globally, cultural sensitivity becomes essential.
Traffic norms, trust in automation, and interaction expectations vary dramatically across geographies. Western-trained AI won’t behave intuitively in all contexts. Neither will Asian-trained AI. In the world we live today where AI sovereignity is becoming the norm, this technology protectionism will have negative effects. In essence, Automotive AI must learn to “speak the cultural language” of its users worldwide.
Unlike digital AI, embodied AI operates in shared physical environments.
Users feel the vehicle’s motion, see its sensors, and experience its decisions.
Transparency, that means understanding why the AI acts a certain way, is needed to build comfort and trust.
A system that is legally correct but socially unfamiliar will still feel unsafe.
Clear communication of intent, authority, and decision boundaries is crucial. There are many partially answered but generally unanswered questions like:
These are not just technical questions, they are human-factors questions that to a large extend remain unanswered. They are clearly a research challenge and one that we must solve for all users, worldwide.
No single actor can solve embodied AI alone. To make progress we need cross-industry ecosystems, open frameworks, and shared validation protocols.
We must design for diversity, validate for locals, and let adoption be driven by transparency.
My proposal for this is to:
So as the mobility sector races towards AI-embodied vehicles by “sometime-sooner-than-you-think”, the invisible cues, i.e. how systems signal intent, adapt behavior, and earn user trust, will define success.
I truly believe embodied AI isn’t just about driving. It’s about communicating…
Our task as a community is to ensure that intelligent vehicles can act safely and express their intent in ways that are intuitive across cultures.
—Prof. Ignacio Alvarez
![]()
This course is designed to prepare students for their final thesis. It provides fundamental knowledge to develop a study design based on a problem definition, conduct the study, evaluate it, and interpret the results. Thematic clusters in the area of human-computer interaction (e.g., productivity, automated driving, sports, and digitalization) are offered, from which student groups can choose and propose a specific topic. This topic will be developed iteratively in close professional coordination with the respective supervising lecturers. • Basics of user studies (possible applications, definition of research hypothesis) • Study design (dependent/independent variables, laboratory vs. field studies, within-groups/between-groups design) • Planning of experiments (different methods, “fidelity” of an experiment, software/hardware prototypes, Wizard of Oz studies, qualitative surveys/quantitative measurements, ethical aspects, role of an institutional review board (IRB)) • Study implementation (preparation, briefing/debriefing, finding and inviting test subjects, determining group size, learning effects, measuring variables/data collection) • Qualitative data analysis (content analysis, evaluation with MAXQDA/NVIVO, preparation and presentation of results, revision/fine-tuning in Illustrator) • Quantitative data analysis (reflection on the research hypothesis, use of SPSS for statistical evaluations, parametric/nonparametric statistics, correct choice of method, presentation and interpretation of results) • Written/oral presentation of the results (preparation of results, peer review process, final conference-style presentation)
Recent developments highlight the growing role of automated systems in urban mobility. For example, autonomous delivery robots (ADRs), which facilitate contactless delivery, were increasingly used to support lastmile logistics during the COVID-19 pandemic. Additionally, Waymo’s robotaxis have recently completed 150,000 commercial rides and cover approximately 1.6 million kilometers per week. While these developments offer promising mobility solutions, ensuring broad public acceptance is crucial. One of the challenges currently faced is the risk of vandalism, harassment, and aggression against these systems, which can significantly impact safety, usability, and public trust. Addressing these concerns requires a proactive design approach that mitigates risks and enhances security. Within this seminar, students analyzed aspects of aggression, vandalism, harassment, and abuse directed at autonomous robots (e.g. delivery service robots, automated vehicles) with the goal to develop interfaces and technological solutions that mitigate these risks while ensuring the vehicles remain safe and functional for all users. Based on an individual literature review (related work), students (in groups of two or three) identified key challenges and explored innovative concepts. be developed together in a dedicated brainstorming session and refined/substantiated by the individual teams (with feedback from the lecturer).
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
This course is designed to prepare students for their final thesis. It provides fundamental knowledge to develop a study design based on a problem definition, conduct the study, evaluate it, and interpret the results. Thematic clusters in the area of human-computer interaction (e.g., productivity, automated driving, sports, and digitalization) are offered, from which student groups can choose and propose a specific topic. This topic will be developed iteratively in close professional coordination with the respective supervising lecturers. • Basics of user studies (possible applications, definition of research hypothesis) • Study design (dependent/independent variables, laboratory vs. field studies, within-groups/between-groups design) • Planning of experiments (different methods, “fidelity” of an experiment, software/hardware prototypes, Wizard of Oz studies, qualitative surveys/quantitative measurements, ethical aspects, role of an institutional review board (IRB)) • Study implementation (preparation, briefing/debriefing, finding and inviting test subjects, determining group size, learning effects, measuring variables/data collection) • Qualitative data analysis (content analysis, evaluation with MAXQDA/NVIVO, preparation and presentation of results, revision/fine-tuning in Illustrator) • Quantitative data analysis (reflection on the research hypothesis, use of SPSS for statistical evaluations, parametric/nonparametric statistics, correct choice of method, presentation and interpretation of results) • Written/oral presentation of the results (preparation of results, peer review process, final conference-style presentation)
Empathic in-vehicle interfaces can detect and employ a variety of intervention modalities to change user affect and improve user driving experience, for example mitigating driver distraction associated with emotional states. The emotional tone and behavior of in-cabin AI assistants can also play a significant role in shaping user experience, trust, and satisfaction. Emotional awareness in AI is critical for delivering context-appropriate responses, fostering engagement, and ensuring personalized interaction experiences. In this project, students customized AI agents to exhibit emotionally-aware behaviors that align with predefined user personas. Leveraging conversational design principles, they developed tailored conversational flows, focusing on tone, empathy, and adaptability of the AI agent. Usability testing was conducted to assess the assistant’s emotional relevance, user satisfaction, and the effectiveness of its personality in different in-car scenarios. Deliverables included a fully implemented AI assistant prototype with emotional tuned performance, using services like ChatGPT or Speechify Studio, a usability evaluation report in an Automotive UseCase, and a critical analysis of the effectiveness of emotional-aware AI in the automotive context. Students also explored ethical considerations and challenges in designing emotionally aware systems.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
Ensuring driver alertness is a cornerstone of automotive safety, and Large Language Models (LLMs) offer a unique opportunity to create intelligent systems capable of detecting and mitigating sleepiness. By integrating multimodal inputs such as audio cues, video streams, and driving context signals, LLMs can process complex, real-time data to assess driver state and trigger appropriate actions to maintain alertness. In this project, students will design and prototype an automotive agent powered by LLMs to detect and respond to driver sleepiness. The system will utilize multimodal inputs, such as facial expressions, voice tone, and driving behavior, to compute a sleepiness likelihood metric. Based on the metric and additional contextual awareness signals (e.g., time of day, driving duration), the agent will propose tailored interventions, such as adjusting cabin temperature, suggesting a rest stop, or initiating engaging conversations. Students will evaluate the system’s usability, effectiveness, and user satisfaction, exploring the interplay between AI decision-making and driver interaction.
In this course, students designed and implemented a prototype in-vehicle game that incorporated input from an AV safety model, such as an AV agent equipped with RSS in the CARLA driving simulator to provide feedback on safety-related actions. Students evaluated their designed game for usability, engagement, and its effectiveness in increasing safety awareness in driving scenarios. Deliverables included a functional game prototype, an evaluation report, and insights into the application of gamification in AV safety education.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
Educating vehicle passengers and drivers about safety in autonomous vehicles (AVs) can be a challenge, especially when technical concepts like the Responsibility Sensitive Safety (RSS) model are involved. Gamification offers an innovative way to enhance user engagement and increase awareness of AV safety principles through the more natural interfaces of games by transforming complex concepts into interactive and enjoyable experiences. Integrating a safety model like RSS into a game can provide users with real-time feedback on safe driving practices and decision-making in various scenarios, as well as improve overall situational awareness during non-driving tasks.
In this course, students designed and implemented a prototype in-vehicle game that incorporated input from an AV safety model, such as an AV agent equipped with RSS in the CARLA driving simulator to provide feedback on safety-related actions. Students evaluated their designed game for usability, engagement, and its effectiveness in increasing safety awareness in driving scenarios. Deliverables included a functional game prototype, an evaluation report, and insights into the application of gamification in AV safety education.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
This course provides a practical introduction to the integration of generative AI and “vibe coding” into UX work-flows. Students will: • Explore foundational concepts of Generative AI, focusing on LLMs. • Learn techniques of prompt engineering to effectively direct AI tools. • Apply AI-driven methods to enhance UX research processes, from data collection to synthesis and prototyping. • Utilize AI-assisted development platforms, such as ChatGPT, Replit or Cursor, to prototype interactive user interfaces, tools and applications. • Investigate the emerging paradigm of Agentic AI and its potential to autonomously resolve user experience challenges. • Undertake a comprehensive final project, culminating in designing, building, and deploying a specialized AI agent addressing a defined UX issue.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
Ignacio Alvarez et al.. (2010). Voice interfaced vehicle user help. Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2011). Are educational video games all they are cracked up to be published in International Journal of Learning Technology
Ignacio Alvarez et al.. (2011). Autonui a workshop on automotive natural user interfaces.in Autoui 2011
Ignacio Alvarez et al.. (2011). Designing driver centric natural voice user interfaces. Adjunct Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications. online.
Ignacio Alvarez, Hans-Peter Fischer. (2011). iHelp, the Ubiquitous Vehicle User Help. Proceedings of Interact 2011.
Ignacio Alvarez et al.. (2012). AutoNUI: 2nd Workshop on Automotive Natural User Interfaces.Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces
Ignacio Javier Álvarez Martínez. (2012). Contribution to the development of intelligent conversational assistants in automotive environments. EHU.
Ignacio Alvarez et al.. (2012). Emotional Adaptive Vehicle User Interfaces: moderating negative effects of failed technology interactions while driving. Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 2012).
Joshua I Ekandem et al.. (2012). Evaluating the ergonomics of BCI devices for research and experimentation. Ergonomics.
Ignacio Alvarez, Miren Karmele López-de-Ipiña, Juan E Gilbert. (2012). The voice user help, a smart vehicle assistant for the elderly. International Conference on Ubiquitous Computing and Ambient Intelligence.
Joshua I Ekandem et al.. (2014). Response to Letter by Padulo and Ardigò. Ergonomics.
Ignacio Alvarez et al.. (2014). Social, natural, and peripheral interactions: Together and separate. Proceedings of AutomotiveUI 2014.
Ignacio Alvarez et al.. (2014). The Social Car: Socially-inspired Mechanisms for Future Mobility Services. Pervasive and Mobile Computing.
Ignacio Alvarez et al.. (2015). Help on the road: Effects of vehicle manual consultation in driving performance across modalities. International journal of human-computer studies.
Ignacio Alvarez et al.. (2015). Prototyping adaptive automotive UX: A design pedagogy approach. Extended Proceedings of the 7th International Conference on Automotive User.
Ignacio Alvarez et al.. (2015). Report on the in-vehicle auditory interactions workshop: Taxonomy, challenges, and approaches. Adjunct Proceedings AutomotiveUI ’15.
Ignacio Alvarez et al.. (2015). Skyline: a rapid prototyping driving simulator for user experience. AutomotiveUI 2015.
Andreas Löcken et al.. (2015). Workshop on Adaptive Ambient In-Vehicle Displays and Interactions. Automotive UI 2015.
Andreas Riener et al.. (2015). Workshop on Practical Experiences in Measuring and Modeling Drivers and Driver-Vehicle Interactions. Automotive UI 2015.
Andreas Riener et al.. (2016). 1st workshop on ethically inspired user interfaces for automated driving. Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Rod McCall et al.. (2016). 1st workshop on situational awareness in semi-automated vehicles. Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Andreas Riener, Susanne Boll, Andrew L Kun. (2016). Automotive user interfaces in the age of automation (Dagstuhl Seminar 16262). Dagstuhl reports.
Ignacio Alvarez et al.. (2016). Autonomous hmi made easy: Prototyping reactive in-cabin aware hmis. Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’16).
Ignacio Alvarez et al.. (2017). 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings. Automotive UI 2017.
Ignacio Alvarez et al.. (2017). Driver in the loop: Best practices in automotive sensing and feedback mechanisms. Automotive user interfaces: creating interactive experiences in the car.
Ignacio Alvarez et al.. (2017). Skyline: A Platform Towards Scalable UX-Centric In-Vehicle HMI Development. International Journal of Mobile Human Computer Interaction (IJMHCI).
Ignacio Alvarez et al.. (2017). Socializing under the influence of distracted driving: a study of the effects of in-vehicle and outside-of-the-vehicle communication while driving. Springer Nature Advances in Human Aspects of Transportation.
Ignacio Alvarez et al.. (2017). The insight–prototype–product cycle best practices and processes to iteratively advance in-vehicle interactive experiences development. Automotive User Interfaces: Creating Interactive Experiences in the Car.
Ignacio Alvarez et al.. (2017). Towards Adaptive Ambient In-Vehicle Displays and Interactions: Insights and Design Guidelines from the 2015 AutomotiveUI Dedicated Workshop. Automotive User Interfaces: Creating Interactive Experiences in the Car.
Anna-Katharina Frison et al.. (2017). Workshop on user-centered design for automated driving systems. Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2018). An international survey on automated and electric vehicles: Austria, Germany, South Korea, and USA. Springer Nature.
Ignacio Alvarez et al.. (2018). ARV 2018: 2nd Workshop on Augmented Reality for Intelligent Vehicles. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18).
Ignacio Alvarez et al.. (2018). AutomotiveUI. Automotive UI 2018.
Ignacio Alvarez et al.. (2018). Chairs. Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2018). Emotional GaRage: A workshop on in-car emotion recognition and regulation. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications AutomotiveUI 2018.
Marina Strano et al.. (2018). “Peace of Mind”, An Experiential Safety Framework for Automated Driving Technology Interactions. 2018 21st International Conference on Intelligent Transportation Systems (ITSC).
Ignacio Alvarez et al.. (2018). Theo, take a right... uh... left: Conversational Route Negotiations with Autonomous Driving Assistants. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18).
Nese Alyuz et al.. (2018). Towards understanding emotional reactions of driver-passenger dyads in automated driving. 13th IEEE International Conference on Automatic Face & Gesture Recognition.
Anna-Katharina Frison et al.. (2018). Workshop on designing highly automated driving systems as radical innovation. Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18).
Maria Soledad Elli et al.. (2019). 2nd special session on solving the automated vehicle safety assurance challenge. International Conference on Intelligent Transportation Systems (ITSC).
Ignacio Alvarez et al.. (2019). Design of a misbehavior detection system for objects based shared perception V2X applications. IEEE Intelligent Transportation Systems Conference.
Francesco Biondi, Ignacio Alvarez, Kyeong-Ah Jeong. (2019). Human-system cooperation in automated driving. No venue listed.
Ignacio Alvarez et al.. (2019). Human–vehicle cooperation in automated driving: A multidisciplinary review and appraisal. International Journal of Human Computer Interaction.
Moreno Ambrosin et al.. (2019). Object-level perception sharing among connected vehicles. 2019 IEEE Intelligent Transportation Systems Conference (ITSC).
Ignacio Alvarez et al.. (2019). The SKYNIVI experience: evoking startle and frustration in dyads and single drivers. Proceedings of the IEEE International Conference in Intelligent Trasnportations Systems 2019.
Ignacio Alvarez et al.. (2019). Towards standardization of AV safety: C++ library for responsibility sensitive safety. Proceedings of the IEEE Intelligent Vehicle Symposium 2019.
Ignacio Alvarez et al.. (2020). Agents, environments, scenarios: A framework for examining models and simulations of human-vehicle interaction. Transportation research interdisciplinary perspectives.
Ignacio Alvarez et al.. (2020). Auto-UI Global Perspectives. ACM IX Interaction Journal.
Ignacio Alvarez et al.. (2020). Emotion GaRage Vol. II A Workshop on Affective In-Vehicle Display Design. Proceedings of 12th International Conference in Automotive User Interfaces and Interactive Vehicular Applications.
Chen Chai et al.. (2020). Evaluation of responsibility-sensitive safety (rss) model based on human-in-the-loop driving simulation. In proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems.
Alëna Rodionova et al.. (2020). How safe is safe enough? Automatic safety constraints boundary estimation for decision-making in automated vehicles. Proceedings of IEEE Intelligent Vehicle Symposium 2020.
Ignacio Alvarez et al.. (2020). PURSS: Towards Perceptual Uncertainty Aware Responsibility Sensitive Safety with ML.. Proceedings of 2020 AAAI Conference.
Ignacio Alvarez et al.. (2021). MISO-V: Misbehavior detection for collective perception services in vehicular communications. Proceedings of IEEE Intelligent Transportation Systems Conference 2021.
Maximilian Naumann et al.. (2021). On responsibility sensitive safety in car-following situations-a parameter analysis on german highways. In 2021 Proceedings of IEEE Intelligent Vehicles Symposium (IV).
Ignacio Alvarez et al.. (2021). To err is human: The role of human derived safety metrics in an age of automated vehicles. SAE Technical Paper.
Shabnam FakhrHosseini et al.. (2022). Driver emotions in automated vehicles. User Experience Design in the Era of Automated Driving.
Ignacio Alvarez et al.. (2022). Emotion GaRage Vol. III: A Workshop on Affective In-Vehicle Display Applications. Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2022). Empathic vehicle design: Use cases and design directions from two workshops. CHI 2022.
ITS IEEE VT et al.. (2022). IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems. No venue listed.
Fenglian Pan et al.. (2022). Quantifying Error Propagation in Multi-Stage Perception System of Autonomous Vehicles via Physics-Based Simulation. Proceedings of the IEEE 2022 Winter Simulation Conference.
Ignacio Alvarez et al.. (2022). Special Issue. MDPI Sensors.
Andreas Riener, Myounghoon Jeon, Ignacio Alvarez. (2022). User experience design in the era of automated driving. Springer Studies in Computational 980.
ITS IEEE VT et al.. (2022). White Paper-Literature Review on Kinematic Properties of Road Users for Use on Safety-Related Models for Automated Driving Systems. IEEE Standards.
Ignacio Alvarez et al.. (2023). Application of Responsibility-Sensitive Safety in Areas with Limited Visibility: Occlusions in RSS. 2023 IEEE 26th International Conference on Intelligent Transportation Systems.
Ignacio Alvarez et al.. (2023). Emotion GaRage Vol. IV: Creating empathic in-vehicle interfaces with generative AIs for automated vehicle contexts. Proceedings of Automotive UI 2023.
Ignacio Alvarez et al.. (2023). “Play Your Anger”: A report on the empathic in-vehicle interface workshop. Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2023). RSS Demonstrator: a Tool for User Experience Interactions with Automated Driving Safety Models. Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2024). Inside Out: Emotion GaRage Vol. V. Adjunct Proceedings of the 16th International Conference on Automotive User Interfaces and Interactive Vehicular Applications.
Ignacio Alvarez et al.. (2024). Reliability modeling for perception systems in autonomous vehicles: A recursive event-triggering point process approach. Transportation Research Part C Emerging Technologies.
Choe, M., Dong, J., Bosch, E., Alvarez, I., Oehl, M., Jallais, C., Alsaid, A., & Jeon, M. (2025). Driving with Empathy: Workshop Report on AI-driven In-vehicle Empathic Agent Design for Automated Vehicles. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 0(0).
Esther Carolina Kaehne, Amelie Patzer, Julia Lachmann, and Ignacio Alvarez. 2025. Designing Multimodal In-Car Conversational Agents for Parents: A Simulator Study. In Adjunct Proceedings of the 17th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI25 Adjunct). Association for Computing Machinery, New York, NY, USA, 190–195.
University Invited Lecture at Universidad Carlos 3 Madrid (UCM3), Master de Movilidad Cooperative Conectada, Madrid, Spain
Panel Webinar at University of Surrey x Anthrometric, Online
Single line blockquote:
Quotes are cool.
| Entry | Item | |
|---|---|---|
| John Doe | 2016 | Description of the item in the list |
| Jane Doe | 2019 | Description of the item in the list |
| Doe Doe | 2022 | Description of the item in the list |
| Header1 | Header2 | Header3 |
|---|---|---|
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| cell1 | cell2 | cell3 |
| cell4 | cell5 | cell6 |
| Foot1 | Foot2 | Foot3 |
Make any link standout more when applying the .btn class.
Watch out! You can also add notices by appending {: .notice} to a paragraph.
This is an example of a link.
The abbreviation CSS stands for “Cascading Style Sheets”.
“Code is poetry.” —Automattic
You will learn later on in these tests that word-wrap: break-word; will be your best friend.
This tag will let you strikeout text.
The emphasize tag should italicize text.
This tag should denote inserted text.
This scarcely known tag emulates keyboard text, which is usually styled like the <code> tag.
This tag styles large blocks of code.
.post-title {
margin: 0 0 5px;
font-weight: bold;
font-size: 38px;
line-height: 1.2;
and here's a line of some really, really, really, really long text, just to see how the PRE tag handles it and to find out how it overflows;
}
Developers, developers, developers…
–Steve Ballmer
This tag shows bold text.
Getting our science styling on with H2O, which should push the “2” down.
Still sticking with science and Isaac Newton’s E = MC2, which should lift the 2 up.
This allows you to denote variables.
This is a page not in the menu. You can use markdown in this page.
Technology Executive | Automotive & AI Leader
📍 Based in Germany · Open to Relocation Globally
Technology Executive with a track record of CTO-level impact in the Automotive & AI sectors. Proven leader with 15+ years of experience architecting and scaling intelligent systems from R&D to series production, driving 30% YoY R&D ROI amidst budget reductions, leading global R&D organizations of 100+ engineers, and launching platforms adopted by 1M+ users. Expert in defining technical vision that aligns with C-suite objectives, secures market leadership, and generates massive IP value (150+ patents).
Technische Hochschule Ingolstadt
2025–Present
Establish and lead cutting-edge research initiatives in human-centered intelligent vehicles while securing substantial funding and building academic-industry partnerships.
Secured €3M grant from the High-Tech Agenda Program of the Government of Bavaria to develop comprehensive research programs in AI and Automotive. Established THI Doctoral School membership and developed advanced curriculum for Automotive AI Masters and User Experience Design programs.
Successfully positioned THI as a leading European research institution in AI and Automotive, with substantial funding secured and advanced educational programs established across Computer Science and Engineering faculties.
Intel Corporation – Intel Labs
2021–2025
Maximize R&D value and strategic impact while managing 8% yearly budget reductions across Intel Labs' global engineering organization, requiring innovative approaches to resource optimization and strategic technology investments.
Established unified research strategies and cross-functional collaboration across Intel Labs' 500+ person global engineering organization. Steered autonomous driving R&D strategy aligning 100+ multi-regional engineering resources. Served as key technology advisor for M&A, divestiture, and IPO activities within the automotive sector.
Achieved average 30% YoY increase in R&D ROI, reversing the impact of budget cuts across semiconductor design, packaging, systems, networking, software, algorithmic development and AI. Successfully architected and deployed production-grade automated driving safety systems, reducing validation cycles by ~20% and accelerating compliance with emerging safety regulations.
Intel Corporation – Intel Labs
2014–2021
Develop and commercialize a comprehensive multimodal in-vehicle R&D platform that integrates cutting-edge technologies while establishing Intel as a leading automotive technology partner and securing substantial research funding.
Led cross-institutional research collaborations, securing $5M+ in funding and partnerships. Transferred multiple key technologies to Intel's and Mobileye product teams. Led open-source contributions to industry bodies and international standards, bridging research to real-world impact.
Successfully deployed "Skyline" platform across 10+ global automotive OEMs, showcased at international forums (Google IO, Intel 360). Secured 50+ granted patents and 100+ pending in autonomous systems, AI and robotics. Published 70+ papers and built thought leadership in automotive AI safety and HMI.
BMW Group
2012–2014
Lead rapid expansion into Asia-Pacific's fastest-growing automotive market while ensuring 24/7 reliability and scalability of connected vehicle services during record growth, and differentiate BMW in a competitive luxury market through innovative in-car technology.
Managed 100+ IT engineering division across Asia-Pacific, overseeing data centers, telematics, and in-car digital services. Pioneered in-car voice and AI assistants, collaborating with partners like Nuance and Microsoft. Developed integrated multimodal user manual for BMW 7 series.
Achieved over 1 million new users in the first year, significantly enhancing customer engagement. Launched industry's first natural-language voice assistant and multimodal user manual, setting new standards for in-vehicle HMI and earning industry-wide commendations for innovation.
BMW IT Research Center and Clemson University, I-CAR
2009–2012
Develop cutting-edge automotive technology prototypes that can inform future product roadmaps while bridging academic research with commercial applications in the automotive industry.
Collaborated between BMW Technology Office USA and Clemson University to develop functional prototypes for location-based services, voice-activated navigation, augmented reality user manuals, and driver assistance systems.
Successfully created first proofs-of-concept that informed future BMW product roadmaps, establishing foundational technologies for connected vehicle services and advanced driver assistance systems.
Holder of 150+ patents (50+ granted) in autonomous systems, AI, and robotics, shaping the core IP strategy for market-leading mobility solutions.
View Patent PortfolioAuthor of 70+ publications in top-tier IEEE and ACM venues and editor of multiple books on autonomous system engineering.
View PublicationsKey contributor to the definition of global safety and communication standards for autonomous vehicles through leadership roles in IEEE and ETSI.
View Standards WorkUniversity of the Basque Country, Spain & Clemson University, USA, 2012
Summa Cum Laude
Joint international doctoral program focusing on conversational AI for vehicles.
Hochschule Offenburg, Germany, 2009
Coursework in multimedia systems and human-computer interaction.
University of Burgos, Spain, 2006
Summa Cum Laude
Minor in Telecommunications.
This map is generated from a Jupyter Notebook file in /_talks/talkmap.ipynb, which mines the location fields in the .md files in _talks/.
Systems and methods for vehicle-occupancy-based and user-preference-based smart routing and autonomous volumetric-occupancy measurement
Published in: Patent Office Authors: Francesc Guim Bernat et al. Citations: 0
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Safe and scalable model for culturally sensitive driving by automated vehicles
Published in: Patent Office Authors: John Weast et al. Citations: 0
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 0
Maneuver coordination service in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 31
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 5
Generation of spatial sound signal from auditory perspective of individual
Published in: Patent Office Authors: Rafael Rosales, Ignacio Alvarez, Willem Beltman Citations: 0
Blind spot based risk assessment of road maneuvers
Published in: Patent Office Authors: Rafael Rosales, Ignacio J Alvarez, Michael Paulitsch Citations: 0
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Time of flight distance determinations
Published in: Patent Office Authors: Shabbir Ahmed et al. Citations: 0
Systems and methods for intrusion detection in vehicle systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 12
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 0
Scalable Digital Twin Services for intelligent transport systems (ITS) with Optimized Communication and Dynamic Resource Adaptation
Published in: Patent Office Authors: Ned M Smith et al. Citations: 0
Safety system for a vehicle
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 0
Robust multimodal sensor fusion for autonomous driving vehicles
Published in: Patent Office Authors: Nilesh Ahuja et al. Citations: 1
Robotic manipulation planning based on probalistic elastoplastic deformation material point method
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Personalized mobility as a service
Published in: Patent Office Authors: Nesreen K Ahmed et al. Citations: 1
Neural network verification based on cognitive trajectories
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Liuyang Yang et al.
No venue listed (2024)
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 0
Methods, apparatus, systems and articles of manufacture for providing query selection systems
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods and Tools for the Engineering and Assurance of Safe Autonomous Systems (Dagstuhl Seminar 24151)
Published in: Dagstuhl Reports Authors: Elena Troubitsyna et al. Citations: 0
Methods and apparatus to generate acceptability criteria for autonomous systems plans
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
High dynamic range imaging using external light source
Published in: Patent Office Authors: Michael Paulitsch et al. Citations: 0
Geographic heat or cold distribution model
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 0
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 0
Device and method for route planning
Published in: Patent Office Authors: Yuqing Hou et al. Citations: 1
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 0
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 0
Affordance-aware, multi-resolution, free-form object manipulation planning
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 1
Trusted lightweight communication in cloud robotics
Published in: Patent Office Authors: Amr Mokhtar, Hassnaa Moustafa, Ignacio J Alvarez Citations: 0
Technology to generalize safe driving experiences for automated vehicle behavior prediction
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 9
Systems, methods, and devices for driving control
Published in: Patent Office Authors: Deepak Dasalukunte et al. Citations: 34
System and method for emergency braking
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 8
Sensor calibration and sensor calibration detection
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 25
Real-time localization error correction of autonomous vehicle
Published in: Patent Office Authors: LIU Xiaolong et al. Citations: 2
Methods and devices for vehicle safety mechanisms
Published in: Patent Office Authors: Alexander Carl Unnervik et al. Citations: 1
Methods and arrangements to identify activation profile context in training data
Published in: Patent Office Authors: Glen J Anderson et al. Citations: 5
Methods and apparatus to provide machine programmed creative support to a user
Published in: Patent Office Authors: Ignacio Javier Alvarez et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 0
Methods and apparatus to generate vehicle warnings
Published in: Patent Office Authors: Sridhar Sharma et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 2
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Enhanced operational domain monitoring and visualization systems and methods
Published in: Patent Office Authors: Ignacio J Alvarez, Yang Liu, Fabricio Novak Citations: 3
Edge-centric techniques and technologies for monitoring electric vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 5
Driving surface protrusion pattern detection for autonomous vehicles
Published in: Patent Office Authors: Jose Rodrigo Camacho Perez et al. Citations: 3
Autonomous vehicle system for detecting safety driving model compliance status of another vehicle, and planning accordingly
Published in: Patent Office Authors: Javier Turek et al. Citations: 0
Automatic robot perception programming by imitation learning
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 11
Automated network control systems that adapt network configurations based on the local network environment
Published in: Patent Office Authors: Javier Perez-Ramirez et al. Citations: 0
A vision-based approach for unmanned aerial vehicles to track industrial pipes for inspection tasks
Published in: Patent Office Authors: Sara Roos-Hoefgeest et al. Citations: 12
Vulnerable road user safety technologies based on responsibility sensitive safety
Published in: Patent Office Authors: Vesh Raj Sharma Banjade et al. Citations: 24
Technology to support the coexistence of multiple independent lidar sensors
Published in: Patent Office Authors: Alexander Marshall Merritt et al. Citations: 0
Technology to handle ambiguity in automated control systems
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Technologies for intelligent traffic optimization with high-definition maps
Published in: Patent Office Authors: Mehrnaz Khodam Hazrati et al. Citations: 0
Technologies for enabling collective perception in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 11
Systems, devices, and methods involving driving systems
Published in: Patent Office Authors: Florian Geissler et al. Citations: 0
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastián Turek et al. Citations: 0
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
System and method for acceleration-based vector field maps
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 34
Safety system for a vehicle
Published in: Patent Office Authors: David Israel GONZÁLEZ AGUIRRE et al. Citations: 1
Safety system, automated driving system, and methods thereof
Published in: Patent Office Authors: Cornelius Buerkle, Fabian Oboril, Ignacio Alvarez Citations: 0
Quantitative driving evaluation and vehicle safety restrictions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 11
Multimodal sensing in autonomous driving vehicles with self-healing capabilities
Published in: Patent Office Authors: David Arditti Ilitzky et al. Citations: 4
Multimodal automatic mapping of sensing defects to task-specific error measurement
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 1
Methods and devices for determining an action in the presence of road users
Published in: Patent Office Authors: Fabian Oboril et al. Citations: 1
Methods and apparatus to update autonomous vehicle perspectives
Published in: Patent Office Authors: Sara Baghsorkhi et al. Citations: 39
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 8
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods and apparatus to calibrate error aligned uncertainty for regression and continuous structured prediction tasks
Published in: Patent Office Authors: Neslihan Kose Cihangir et al. Citations: 0
In-cabin acoustic-based passenger occupancy and situation state assessment
Published in: Patent Office Authors: Julio ZAMORA ESQUIVEL et al. Citations: 0
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Hardware based abstraction sharing of hardware devices across computing platforms
Published in: Patent Office Authors: Mohammad R Haghighat et al. Citations: 0
Driving safety systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 6
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 23
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 16
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 9
Collaborative 3-D environment map for computer-assisted or autonomous driving vehicles
Published in: Patent Office Authors: Sridhar G Sharma et al. Citations: 14
Autonomous vehicle system
Published in: Patent Office Authors: Hassnaa Moustafa et al. Citations: 216
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Apparatus and methods for object manipulation via action sequence optimization
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Apparatus and methods for industrial robot code recommendation
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 3
Technologies for labeling and validating human-machine interface high definition-map data
Published in: Patent Office Authors: Domingo Gonzalez et al. Citations: 1
Systems, methods, and devices for generating and using safety threat maps
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 1
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 26
Self-adaptive multiresolution digital-plate for multimodal enhanced safety of vehicles
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 4
Rogue vehicle detection and avoidance
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 33
Optimizing charging, fueling, and parking overheads of fleet vehicles in a maas architecture
Published in: Patent Office Authors: Juan Pablo Munoz et al. Citations: 27
Obstacle representation display
Published in: Patent Office Authors: Ignacio Alvarez, Fabricio Novak, Marina Tereza Weishaupt Strano Citations: 0
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 4
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 5
Methods and devices for a vehicle
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Methods and devices for a road user
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 4
Methods and apparatus to implement a neural network
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 1
Methods and apparatus to automatically generate code for graphical user interfaces
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 29
Infrastructure assisted efficient collective perception service for connected vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 7
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Environment specific model delivery
Published in: Patent Office Authors: Juan Munoz et al. Citations: 1
Emotional adaptive driving policies for automated driving vehicles
Published in: Patent Office Authors: Jennifer Healey, Victor Palacios Rivera, Ignacio Alvarez Citations: 70
Driver monitoring system (dms) data management
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 16
Driver and environment monitoring to predict human driving maneuvers and reduce human driving errors
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 12
Disambiguation of vehicle navigation actions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Detection and mitigation of inappropriate behaviors of autonomous vehicle passengers
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 4
Crowdsourced detection, identification and sharing of hazardous road objects in HD maps
Published in: Patent Office Authors: SM Iftekharul Alam et al. Citations: 40
Collaborative safety driving model for autonomous vehicles
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 8
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 21
An online safety guard for intelligent transportation systems
Published in: Patent Office Authors: Bernd Gassmann et al. Citations: 4
Use of temporal motion vectors for 3D reconstruction
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 0
Technology to apply driving norms for automated vehicle behavior prediction
Published in: Patent Office Authors: Guixiang Ma et al. Citations: 12
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 14
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 12
Method and device for determining a configuration for an autonomous vehicle
Published in: Patent Office Authors: Alena Rodionova, Ignacio Alvarez Citations: 8
High-fidelity 3D reconstruction using facial features lookup and skeletal poses in voxel models
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 14
Distributed traffic safety consensus
Published in: Patent Office Authors: Ignacio J Alvarez, Rafael Misoczki, Andrea Miele Citations: 27
Accessibility method and apparatus for autonomous/semi-autonomous driving
Published in: Patent Office Authors: Ignacio J Alvarez, Joshua Ekandem Citations: 4
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 0
10 Driver Capabilities in the Resumption of Control
Published in: Patent Office Authors: Sherrilene Classen, Liliana Alvarez Citations: 4
Trusted vehicle telematics using blockchain data analytics
Published in: Patent Office Authors: Ignacio Alvarez, Mic Bowman Citations: 112
Trusted vehicle messaging via transparent display
Published in: Patent Office Authors: Darrell Norman LeBlanc et al. Citations: 16
Technologies for contextual natural language generation in a vehicle
Published in: Patent Office Authors: Jesus Gonzalez, Ignacio Alvarez Citations: 11
Technologies for autonomous three-dimensional modeling
Published in: Patent Office Authors: Javier Felip Leon, David I Gonzalez Aguirre, Ignacio J Alvarez Citations: 0
Response of vulnerable road users to visual information from autonomous vehicles in shared spaces
Published in: Patent Office Authors: Walter Morales Alvarez et al. Citations: 31
Realistic sensor simulation and probabilistic measurement correction
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 4
Generating three dimensional models using single two dimensional images
Published in: Patent Office Authors: David I Gonzalez Aguirre, Javier Felip Leon, Ignacio J Alvarez Citations: 4
Controller and interface for vehicle seat
Published in: Patent Office Authors: James T Hotary, Ignacio Alvarez, Brian R Dexter Citations: 15
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 8
Generating voxel representations and assigning trust metrics for ensuring veracity for use with multiple applications
Published in: Patent Office Authors: Robert Adams et al. Citations: 7
Voice-interfaced in-vehicle assistance
Published in: Patent Office Authors: Hans-Peter Fischer, Ignacio Alvarez Citations: 26
Human-Computer Interfaces for Speech Applications.
Published in: Patent Office Authors: Shelby Solomon Darnell et al. Citations: 0
This is an item in your portfolio. It can be have images or nice text. If you name the file .md, it will be parsed as markdown. If you name the file .html, it will be parsed as HTML.
Published in Adjunct Proceedings of the 17th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2025
This paper investigates how in-car conversational agents can support parents driving with young children—a group prone to distraction and cognitive overload. In a high-stress driving simulator study, 22 participants experienced a navigation assistant using four modalities: visual, verbal, non-verbal auditory, and haptic. Feedback was collected using a modified NASA TLX (DALI) and interviews. Verbal navigation instructions were rated most effective, reducing stress and distraction, while haptic feedback was seen as a useful secondary channel for urgent cues. Non-verbal auditory signals were largely ineffective in noisy environments. Participants favored multimodal combinations that balanced clarity with low cognitive demand. Based on these findings, we offer design recommendations for adaptive, family-aware in-car systems, emphasizing verbal communication, context sensitivity, and user customization.
Published in Proceedings fo the Human Factors and Ergonomics Society Annual Meeting, 2025
The rapid development of automated vehicles offers promising avenues to enhance user experience and safety by integrating empathic in-vehicle interfaces. The report from the workshop Emotion GaRage series, held during the AutomotiveUI ’23 conference, investigates the potential of employing generative artificial intelligence (AI) to develop these empathic interfaces. Our workshop emphasized the importance of emotion recognition and regulation for passengers in driving contexts and the role of future in-vehicle empathic interfaces. Through collaborative design sessions, participants developed personalized in-vehicle agents to address drivers’ emotional states to improve safety and enjoyment. We explored insights by investigating the potential and possibilities of using generative AI in the design process. This report discusses the significance of empathic displays in facilitating the adoption of automated vehicles and explores the potential and limitations of using generative AI in the design phases.
Published in ‘Transportation Research Part C: Emerging Technologies’, 2024
Ensuring the reliability of sensor-fusion-based perception systems is crucial for the safe deployment of autonomous vehicles. Such systems function through a sequence of interconnected stages, where errors in upstream stages may propagate to downstream stages and trigger additional errors. The cross-stage error propagation conceptually exists and makes errors in different stages, not independent, posing model challenges, estimation challenges, and data challenges for reliability modeling. The existing methods cannot be applied to address all these challenges. Thus, this paper presents a recursive event-triggering point process to explicitly consider the error propagation based on the simulated data. The data are simulated from a proposed error injection framework, which can generate various errors from a sequence of interconnected stages in a perception system. The latent and probabilistic error propagation information is incorporated into a modified expectation–maximization (EM) algorithm for parameter estimation. The numerical and physics-based simulation case studies demonstrate the prediction accuracy and interpretability of the proposed modeling methodology.
Published in ‘Adjunct Proceedings of the 16th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2024
The rapid advancement of automated vehicles has aroused the curiosity of researchers in the automotive field. Understanding the emotional aspects of this technology is critical to improving human-vehicle interactions. The topics of the proposed workshop will be expanded from internal to external empathetic interface designs of automated vehicles. The workshop will gather researchers and practitioners to brainstorm and design affective internal and external interfaces for automated vehicles, targeting specific use cases within the social context. During the workshop, participants will use an affective design tool and generative AI to prototype affective interface designs in automated vehicles. With this creative approach, we aim to expand the knowledge of affective eHMIs in addition to in-vehicle designs and understand social factors that contribute to the user perceptions of automated vehicles.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Safety Assurance remains a challenge for the large-scale deployment of Automated Driving Systems (ADS). Safety models monitor the performance of the ADS. Most safety models are validated both in simulation and during on-road tests. However, first-hand experiences and analysis of ADS safety models are not easily accessible to the general research community. This paper introduces the RSS driving demonstrator an open-source simulation tool that enables first-hand experience of the Responsibility Sensitive Safety (RSS) safety model proposed by Intel and Mobileye and adopted by several Automotive Industry standards and regulatory frameworks. The RSS demonstrator enables first-hand interactions and experience of ADS safety model restrictions in both automated and manual driving conditions. As a User Experience (UX) tool, it provides quantitative safety metrics and flexible user interaction features. The results indicate it served to both evangelize the RSS ADS safety model with laymen population and is a versatile tool for Automotive UX development.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Empathic in-vehicle interfaces are critical in improving user safety and experiences. There has been much research on how to estimate drivers’ affective states, whereas little research has investigated intervention methods that mitigate potential impacts from the driver’s affective states on their driving performance and user experiences. To enhance the development of in-vehicle interfaces considering emotional aspects, we have organized a workshop series to gather automotive user interface experts to discuss this topic at the International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutoUI). The present paper focuses particularly on the intervention methods created by the experts and proposes design recommendations for future empathic in-vehicle interfaces. We hope this work can spark lively discussions on the importance of drivers’ affective states in their user experience of automated vehicles and pose the right direction.
Published in ‘Proceedings of ACM’s Automotive UI 2023’, ACM 2023
This workshop aims to design advanced empathic user interfaces for in-vehicle displays, particularly for high-level automated vehicles (SAE level 3 or higher). Incorporating model-based approaches for understanding human emotion regulation, it seeks to enhance the user-vehicle interaction. A unique aspect of this workshop is the integration of generative artificial intelligence (AI) tools in the design process. The workshop will explore generative AI’s potential in crafting contextual responses and its impact on user experience and interface design. The agenda includes brainstorming on various driving scenarios, developing emotion-oriented intervention methods, and rapid prototyping with AI tools. The anticipated outcome includes practical prototypes of affective user interfaces and insights on the role of AI in designing human-machine interactions. Through this workshop, we hope to contribute to making automated driving more accessible and enjoyable.
Published in ‘2023 IEEE 26th International Conference on Intelligent Transportation Systems’, IEEE 2023
Areas of limited visibility are common in day-to-day traffic: be it static buildings, parked vehicles, traffic participants blocking the vehicle’s line of sight, harsh weather conditions or just narrow curves that impede the automated driving sensor suite to inspect the road ahead. Autonomous vehicles have to be able to safely cope with this kind of constraints. The Responsibility-Sensitive Safety model (RSS) demands vehicles to exercise caution with respect to occlusions and to consider also occluded road agents. This paper provides a concrete implementation of how occlusions in RSS can be addressed and investigates the balance between safety and usefulness of the model when a reasonably foreseeable behavior of occluded road agents is assumed. We perform occlusion experiments in urban as well as on highway scenarios with the driving simulation platform CARLA applying different parameterization of the agents kinematic properties and the safety model parameters to analyse and judge the consequences with respect to safe driving and overcautious driving behaviors.
Published in IEEE Standards, 2022
This document presents a review of relevant literature (e.g., standards, regulations, and scientific publications) that investigated kinematic behavior of road users. This review is intended to serve as a key contribution to the Automated Driving Systems (ADS) research and industry communities, as well as to current standardization efforts, such as IEEE Std 2846, IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems.
Published in Journal Name, 2023
This book is dedicated to user experience design for automated driving to address humane aspects of automated driving, e.g., workload, safety, trust, ethics, and acceptance. Automated driving has experienced a major development boost in recent years. However, most of the research and implementation has been technology-driven, rather than human-centered. The levels of automated driving have been poorly defined and inconsistently used. A variety of application scenarios and restrictions has been ambiguous. Also, it deals with human factors, design practices and methods, as well as applications, such as multimodal infotainment, virtual reality, augmented reality, and interactions in and outside users. This book aims at 1) providing engineers, designers, and practitioners with a broad overview of the state-of-the-art user experience research in automated driving to speed-up the implementation of automated vehicles and 2) helping researchers and students benefit from various perspectives and approaches to generate new research ideas and conduct more integrated research.
Published in ‘MDPI Sensors’, 2022
Connected and automated driving technologies have the potential to revolutionize transportation by facilitating mobility services to a wider population, improving safety and traffic efficiency. Automated driving technology is expected to reduce the number of accidents caused by human error and avert deadly crashes, ensure mobility for all, including old and impaired individuals, allow the human driver to perform alternative (secondary) tasks, increase traffic flow efficiency, reduce fuel consumption, and lower emissions.
Driven by these goals, humankind is experiencing an exponential growth in vehicle automation taking over the monitoring of surroundings and vehicle control tasks from human drivers in a quest towards full autonomy. Connected and automated vehicles are equipped with multimodal sensors that allow continuous perception and monitoring of driving tasks to assist drivers in lower levels of SAE automation or to fully take control of driving tasks under full SAE automation. Numerous sensors, both inside and outside vehicles, allow the detection and identification of oncoming obstacles, the determination of their velocity, and the prediction of future behaviours to avoid potential collisions. Each sensor has its own strengths and weaknesses in terms of range, accuracy, energy consumption. and sensitivity towards external conditions such as weather and light. Automated vehicles usually rely on a mix of signals to improve operational reliability and robustness under the dynamic external conditions of real-world deployments. Generally, we can divide external AV sensors into two major groups: active and passive. Active sensors generate an active signal (electromagnetic or light) transmitted to the external environment to analyse its reflection (e.g., radar, lidar), whereas passive sensors just record the information from the environment (e.g., camera). Additionally, there have been advances in intelligent transportation infrastructure to monitor road users, perform predictive analytics, and facilitate collaborative perception services and remote vehicle control.
The increasing commercial availability of conditional automation (SAE level 3) and the incoming Robotaxi services (SAE Level 4) have also resulted in an increase in in-cabin monitoring sensors dedicated to monitoring driver and passenger behaviours. Multimodal in-cabin monitoring systems are crucial enablers for successfully managing automated vehicle operations. These systems enable the detection of the driver/passenger’s physiological state and activity to assess their readiness to take over control of the vehicle if required as well as to monitor their safety. Driving monitoring solutions provide information on occupants’ fatigue, distraction, discomfort, and stress. Furthermore, they can help to verify that automation is used properly by evaluating engagement in the driving monitoring task or the inherent risk of the non-driving tasks.
This Special issue aims to collect original theoretical or empirical articles on different sensing technologies, solutions, and applications for automated vehicles.
Published in Proceedings of the IEEE 2022 Winter Simulation Conference, IEEE 2023
Ensuring the safety of autonomous vehicle (AV) relies on accurate prediction of error occurrences in its perception system. Due to the inter-stage functional dependence, the error occurred at a certain stage may be propagated to the following stage and generate extra errors. To quantify the error propagation, this paper adopts the physics-based simulation, which enables fault injection at different stages of an AV perception system to generate error event data for error propagation modeling. A multi -stage Hawkes process (MSHP) is proposed to predict the error occurrences in each stage, with error propagation represented as a latent triggering mechanism. With explicitly considering the error propagation mechanism, the proposed outperforms benchmark methods in predicting error occurrence in a physics-based simulation of a multistage AV perception system. The proposed two-step likelihood-based algorithm accurately estimates the model coefficients in a numerical simulation case study.
This standard applies to road vehicles. It defines a minimum set of reasonable assumptions and foreseeable scenarios that shall be considered in the development of safety related models that are part of an automated driving system (ADS). Scope: This standard applies to road vehicles. For a set of scenarios, a minimum set of assumptions regarding reasonably foreseeable behaviors of other road users are defined that shall be considered in the development of safety-related models for automated driving systems (ADS). This standard further defines a list of attributes common to contributed safety-related models and methods to help verify whether a safety-related model takes the minimum set of assumptions into consideration. An informative annex instantiates several examples of how the proposed minimum set of assumptions could be employed in ADS development. Sources of uncertainty, such as prediction or perception errors, are out of scope to this standard. This standard does not guarantee the safety of the overall system in all scenarios. Purpose: Government and Industry alike need an open, transparent, and technology-neutral standard that provides guidance useful for evaluating the performance of an ADS. This guidance consists of a minimum set of assumptions with bounds on reasonably foreseeable behaviors of other road users used in the development of safety-related models.
@ARTICLE{9761121, author={}, journal={IEEE Std 2846-2022}, title={IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems}, year={2022}, volume={}, number={}, pages={1-59}, keywords={IEEE Standards;Autonomous vehicles;Vehicle safety;Autonomous driving;Vehicle driving;Data privacy;Decision making;ADS;ADS-operated vehicle;automated driving system;assumption;automated vehicle;autonomous vehicles;AV;decision-making;IEEE 2846}, doi={10.1109/IEEESTD.2022.9761121}}
Published in ‘Proceedings of ACM’s Computer Human Interaction Conference (CHI)’, ACM 2022
Empathic vehicles are expected to improve user experience in automated vehicles and to help increase user acceptance of technology. However, little is known about potential real-world implementations and designs using empathic interfaces in vehicles with higher levels of automation. Given advances in affect detection and emotion mitigation, we conducted two workshops (N1 =24, N2 = 22, Ntotal = 46) on the design of empathic vehicles and their potential utility in a variety of applications. This paper recapitulates key opportunities in the design and application of empathetic interfaces in automated vehicles which emerged from the two workshops hosted at the ACM AutoUI conferences.
Published in ‘Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, ACM 2022
Empathic in-vehicle interfaces can address driver affect and mitigate decreases in driving performance and behavior that are associated with emotional states. Empathic vehicles can detect and employ a variety of intervention modalities to change user affect and improve user experience. Challenges remain in the implementation of such strategies, as a broader established view of practical intervention modalities and strategies is still absent. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of displays and alternatives suitable to various use case situations in current and future vehicle states. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this workshop, researchers will create a design flowchart for in-vehicle affective display designers when creating displays for an empathic vehicle.
There is little doubt that driving generates emotional responses, whether that’s the joy of freedom, the boredom of stop-and-go traffic or anger towards unsafe maneuvers. In this chapter we provide an overview of emotion research applied to the automotive context and highlight the impact of emotional states in varying levels of driving automation. We review the most critical research findings on the impact of emotional states in driving performance including reaction time and take-over readiness. We also discuss the application of emotion regulation strategies related to the driving task. Finally, we analyze the research challenges still present for robust emotional classification and personalization in their application to in-vehicle interactions. This technology offers great potential for the development of emotionally-aware in-cabin driver assistants which will play a critical role in the future of automated driving user experience development.
Published in ‘SAE Technical Paper’, SAE 2021
As industry races to complete technical development of automated driving systems (ADS), important questions are being raised about how to measure the safety of such systems and the overall safety of Automated Vehicles (AVs). Traffic safety engineers have for decades utilized metrics to assess the safety of human drivers and measurements such as Time To Collision (TTC) and Time Headway (THW) have proven to be a useful indicator of increased risk of an accident for human drivers. But what if we can do better with AVs? Are human driving derived risk metrics meaningful for a self-driving vehicle? Recently, the Institute for Automated Mobility (IAM) published a set of metrics defined specifically for self-driving vehicles that provide a thorough assessment of the safety of an AV. While humans must use estimation and cautious judgement to make decisions, AVs can use precise measurement techniques via sensors and correlate multiple sources of data in real time. Utilizing information such as the reaction time of the ADS, the braking capability of the AV and more, the IAM proposed metrics allow for the assessment of the safety of an AV to be accurately measured, not as a notion of approximated risk, but as a binary calculation of safety. In this paper we analyze, compare and contrast human driving, risk-oriented safety metrics with the more definitive metrics proposed for AVs. We answer important questions about the necessary evolution of human derived metrics to ensure they are meaningful in the assessment of the safety of an AV, as well as whether novel metrics proposed for AVs can be used to better understand and assess the safety performance of AVs when compared to historical safety measures. Our research proves that AV-based assessment metrics can provide better insight into the safety of both AVs and human drivers.
Published in Proceedings of the IEEE Intelligent Vehicles Symposium (IV), IEEE 2021
The need for safety in automated driving is undisputed. Since automated vehicles are expected to reduce the number of fatalities in road traffic significantly, hundreds of millions of test kilometers would be required for statistical safety validation [1]. Physics-based safety verification approaches are promising in order to reduce this validation effort. Towards this goal, Mobileye introduced the concept of Responsibility-Sensitive Safety (RSS). In RSS, bounds for the reasonable worst-case behavior of traffic participants are assumed to be given, such as the reaction time or the maximum deceleration. These parameters have a crucial effect on the applicability of the approach: choosing conservative parameters likely hinders traffic flow, while the opposite could lead to collisions, as the assumptions are violated. Thus, in this work, we focus on finding reasonable parameters of RSS. Based on the physical limits, legal requirements and human driving behavior, we propose scopes and parameter sets that allow for a sound safety verification while not hindering traffic flow. Furthermore, we present an approach that explains seemingly frequent human drivers’ RSS violations on highways and may lead to a useful extension of RSS.
Published in ‘Proceedings of IEEE Intelligent Transportation Systems Conference 2021’, IEEE 2021
Recently, Collective Perception Messages (CPM) that carry additional information about the surrounding environment beyond Basic Safety Messages (BSM) or Cooperative Awareness Messages (CAM) have been proposed to increase the situational awareness for Connected and Automated Vehicles (CAV) in Intelligent Transportation Systems. However, blindly trusting perception information from neighbors that cannot be locally verified is dangerous given the safety impact that erroneous or malicious information might have. This paper addresses the data trust challenge of CPMs, proposing a misbehavior detection scheme called MISO- V (Multiple Independent Sources of Observations over V2X) that leverages the inherently overlapping nature of the perception observations from multiple vehicles to verify the semantic correctness of the V2X data and improve the data trust and robustness of V2X systems. CPM-enabled CAVs are implemented and MISO-V performance is evaluated in CARLA-based simulation tool, where falsified V2X packets presenting a ghost car are injected in a suburban T-junction scenario with other cars. The results show that MISO- V is very effective in detecting the ghost car attacks and removing the impact of such misbehavior from influencing the receiver and offers a conservative and sensible approach towards trustworthy Collective Perception Services for CAVs.
Published in ‘Proceedings of 2020 AAAI Conference’, AAAI 2020
Automated driving is an ML-intensive problem and its safety depends on the integrity of perception as well as planning and control. Responsibility Sensitive Safety (RSS) is a recent approach to promote safe planning and control that relies on perfect perception; however, perceptual uncertainty is always present, and this causes the possibility of misperceptions that can lead an autonomous vehicle to allow unsafe actions. In this position paper, we sketch a novel proposal for a formal model of perception coupled with RSS to help mitigate the impact of misperception by using information about perceptual uncertainty. The approach expresses uncertainty as imprecise perceptions that are consumed by RSS and cause it to limit actions to those that support safe behaviour given the perceptual uncertainty. We illustrate our approach using examples and discuss its implications and limitations.
Published in Proceedings of IEEE Intelligent Vehicle Symposium 2020, IEEE 2020.
The determination of safety assurances for automated driving vehicles is one of the most critical challenges in the industry today. Several behavioral safety models for automated driving have been proposed recently and standards discussions are on the way. In this paper we present a method to automatically explore the performance of automated vehicle (AV) safety models utilizing robustness of Metric Temporal Logic (MTL) specifications as a continuous metric of safety. We present a case study of the Responsibility Sensitive Safety model (RSS), introducing a safety evaluation pipeline based on the CARLA driving simulator, RSS and a set of safety-critical driving scenarios. Our method automatically extracts safety relevant profiles for these scenarios providing practical parametric boundaries for implementation. Furthermore, we evaluate the trade-offs between safety and utility within the safe RSS parameter space through a proposed naturalistic benchmark challenge that we open-sourced. We analyze different RSS parameter configurations including assertive and more conservative settings, extracted by our specification-driven framework. Our results show that while maintaining the safety boundaries, the extracted RSS configuration for assertive driving behavior achieves the highest utility.
Published in In proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, IEEE 2020.
Safety is an important challenge in the development of automated vehicles (AVs). To help with the challenge of achieving higher safety in the decision making of AVs, Intel and Mobileye have proposed a parameterized model named Responsibility-Sensitive Safety (RSS). Previous studies have demonstrated that RSS has the potential to improve the safety performance of automated vehicles. However, RSS could lead to a considerable car-following distance depending on the parameter values chosen for the model, which could reduce traffic efficiency. To improve the efficiency of RSS applied to Adaptive Cruise Control (ACC) systems, previous work proposed an efficiency-optimal (referred as “Efficiency-optimal RSS”) variation of the RSS model that involves different triggering conditions of a proper response. Therefore, in this paper a human-in-the-loop driving simulation experiment was conducted to evaluate the performance and acceptance of different safety methods. The RSS model and the efficiencyoptimal variant were embedded in an ACC system based on Model Predictive Control (MPC) algorithm. Two car-following scenarios with a sudden deceleration of lead vehicle at various time headways were simulated to evaluate the human perception and response of the different models. Results show that the original RSS model improves subjective safety judgment of human drivers. While the Efficiency-optimal RSS variant has a lower subjective safety score when compared to original RSS, it significantly reduces driver’s emergency braking reactions when compare to an ACC only system.
Published in ‘Proceedings of 12th International Conference in Automotive User Interfaces and Interactive Vehicular Applications’, 2020
Driver performance and behavior can be partially predicated based on one’s emotional state. Through ascertaining the emotional state of passengers and employing various mitigation strategies, empathic cars can show potential in improving user experience and driving performance. Challenges remain in the implementation of such strategies, as individual differences play a large role in mediating the effect of affective intervention. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of targeted emotion intervention methods. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this short workshop, researchers will determine ideal intervention methods for prospective user groups. This will be achieved through the method of insight combination to generate and discuss ideas.
Published in ACM IX Interaction Journal, 2020
ACM SIGCHI Auto-UI is a growing community, but one in which some continents were less involved than expected and hoped for. For the 2019 conference in Utrecht, the Netherlands, we made various targeted attempts to grow and diversify our international community, with support from the ACM SIGCHI Development Fund. Our efforts resulted in a growth in the number of Asian participants, which made up almost 20 percent of the attendees. In this blog, we briefly reflect on our initiatives and on a panel discussion focusing on research topics that matter more globally to the Auto-UI field.
Published in ‘Transportation research interdisciplinary perspectives’, 2020
This paper provides a framework for examining human-vehicle interactions with respect to three dimensions that can involve models or simulations: the agents, the environments, and the scenarios. Agents are considered on a spectrum from human to artificial actors. Environments are considered on a spectrum from simulated to real. Scenarios are considered on a spectrum from constrained to unconstrained. It is argued that these three dimensions capture key differences in research approaches within the field of human-vehicle interaction, and that explicitly situating research and discussions within this framework will allow researchers to better compare and contrast research outcomes and contributions. The framework is used to locate different disciplines in the community with respect to one another, and to identify areas which are as-yet unexplored.
Published in ‘Proceedings of the IEEE Intelligent Vehicle Symposium 2019’, IEEE 2019
The need for safety in Automated Driving (AD) is becoming increasingly critical with the accelerating deployment of this technology. Beyond functional safety, industry must guarantee the operational safety of automated vehicles. Towards that end, Mobileye introduced the Responsibility Sensitive Safety (RSS), a model-based approach to Safety [1]. In this paper we expand upon this work introducing the C++ Library for Responsibility Sensitive Safety, an open source executable that implements a subset of RSS. We provide architectural details to integrate the C++ Library for Responsibility Sensitive Safety with AD Software pipelines as safety module overseeing decision making of driving policies. We illustrate this application with an example integration with the Baidu Apollo AD stack and simulator, [2] and [3], that provides safety validation of the planning module. Furthermore, we show how the C++ Library for Responsibility Sensitive Safety can be used to explore the usefulness of the RSS model through parameter exploration and analysis on minimum safe longitudinal distance, (dmin), considering different weather conditions. We also compare these results with half-of-speed rule followed in some parts of the world. We expect that the C++ Library for Responsibility Sensitive Safety becomes a critical component of future tools for formal verification, testing and validation of AD safety and that it helps bootstrap the AD research efforts towards standardization of safety.
Published in ‘Proceedings of the IEEE International Conference in Intelligent Transportations Systems 2019’, IEEE 2019
To study naturalistic in-cabin emotion we developed SKYNIVI, a modified open source driving simulator, with scenarios designed to elicit startle and frustration. We target generating these emotions because we believe that by detecting these it will be possible for autonomous vehicles to learn to drive better. We show how to use SKYNIVI to develop datasets that capture naturalistic emotions in drivers and passengers for algorithmic development. We recruited 51 participants as dyads and single drivers to participate in two different scenarios. We show that we were able to evoke hundreds of instances of our target emotions in this cohort and present an analysis of factors we found to impact emotional expression including: scenario design , demographic factors, personality and baseline affect . We find that having a second person in the vehicle impacts observed expressions of emotion even when no difference in baseline affect is reported.
Published in Proceedings of 2019 IEEE Intelligent Transportation Systems Conference (ITSC), IEEE 2023
Advances in vehicular communication technologies have made Connected Vehicles (CVs) a near-term reality. Compared to models where vehicles rely solely on their own perception to sense and make decision on the environment, CVs have the potential to allow information sharing among vehicles to improve sensing and decision making collectively. A first concrete step towards this goal is enabling vehicles to share perception-related information, to overcome limitations of their respective sensors (e.g., partial awareness due to occlusions). Sharing processed information vs raw sensor data has the advantage of reducing the amount of data to be transmitted, and the required computation burden at the receiver side.This paper proposes an approach to enable object-level sharing among vehicles. Following state-of-the-art object-level management techniques, we developed a two-layer architecture that handles object tracking and fusion from dynamic remote sources of information. We implemented our approach and showed that it can achieve realistic performance, and robustness both in terms of quality of information and computation.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in ‘IEEE Intelligent Transportation Systems Conference’, IEEE 2019
The recent trend of integrating vehicular communications with advanced sensors installed on vehicles, enables Connected and Autonomous Vehicles (CAVs) to share their own driving information as well as perception information, such as a list of perceived objects (e.g., dynamic obstacles such as vehicles, pedestrians, and cyclists, and static obstacles). This has the potential to improve driving safety by expanding collective perception of vehicles. However, adversaries may also populate false information to other Connected Vehicles (CVs) via Vehicle-to-Vehicle (V2V) communications. This paper investigates the security aspects of mixed deployment of CAVs, CVs and legacy vehicles, and in particular with regards to misbehavior detection. We provide a generic design framework that is independent from the specific algorithms of the underlying perception system, and can be used to implement a practical Misbehavior Detection System (MDS). We analyze the MDS framework w.r.t. a ghost vehicle attack. While no computing system can be completely secure, we believe this work would help the industry to develop a practical MDS design within a common framework while allowing individual techniques to mature and evolve over time with future academic research.
Published in Proceedings of the 2019 International Conference on Intelligent Transportation Systems (ITSC), IEEE 2019
The scientific knowledge and tools for the mass deployment of Automated Vehicles (AVs) are maturing rapidly, as evidenced by the wide deployment of AV test fleets worldwide. These vehicles have the potential to produce tremendous economic and societal benefits including greatly reduced traffic accidents, injuries, and congestion, and to make less expensive, more flexible and more productive transportation available to all. But one challenge looms above all others in the race to full vehicle automation; solving the AV Safety Assurance challenge. Automated transportation is not just a product, but an industry. And it is as an industry that we must together solve this challenge. We invite researchers, automakers, technology companies, and government regulators to come together to develop a holistic model to define and measure AV Safety. In this special session we present papers that provide contributions to the definition, applicability and standardization of AV safety assurance, including methods for the development of metrics, benchmarks and evangelisation of AV Safety Assurances to users and the public. This session continues the open discussion started in 2018 ITSC with the goal of making AV Safety a reality. The session will consist of high quality paper presentations as well as a panel discussion with some of the most relevant figures of the AV industry.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
Automated driving systems (ADS), especially in higher levels of automation, seem to be the new focus of innovation regarding future mobility. Technological achievements of traveling automation open up new challenges for road traffic. Existing automotive research focuses on problem solving and observational approaches including users and their imagination of the future of mobility to analyze acceptance and user experience of “incremental” (step-wised improved) innovations. On the other hand, “radical” (something new, enabled by technology or meaning change) innovations extensively increase product quality leaping over incremental innovation. This workshop aims to challenge the current research approaches to automated driving against “trying to improve sitting in a horse carriage” and discuss how we can design “radical” innovations for ADS beyond the “horse carriage”. Within this interactive workshop, we will utilize a design thinking approach to refocus on underlying problems that ADSs originally aim to solve and generate ideas for radical innovations.
Published in Proceedings of the 13th IEEE International Conference on Automatic Face & Gesture Recognition, IEEE 2018
Automated driving has the potential to reduce the amount of fatal crashes, lighten the burden of commutes, and democratize mobility access to wider populations. But delegation of control to automation is not without issues. One of the foreseen drawbacks is that users might experience negative emotional reactions to unanticipated or unexplainable automated maneuvers. In this paper we present a novel method to induce targeted emotional reactions, frustration and startle, in simulated automated driving environments. We describe the data collection process for 17 driver - passenger dyads and discuss the data labelling method for generating reliable novel emotion datasets. This contribution is a foundational methodology towards expanding emotional understanding in automated vehicles, a critical skill for building long-term trusted experiences.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
We foresee conversational driver assistants playing a crucial role in automated driving interactions. In this video we present a study of user interactions with an in-vehicle agent, “Theo”, under SAE Level 4 automated driving. We use a remote Wizard-of-Oz setup where participants, sitting in a driving simulator, experience real-life video footage transmitted from a vehicle in the neighborhood and interact with Theo to instruct the vehicle where to go. We configured Theo to present 3 levels of conversational abilities (terse, verbose and helpful). We show the results of 9 participants tasked to negotiate destinations and route changes. Voice interaction was reported as preferred means of communication with Theo. There was a clear preference for talkative assistants which were perceived more responsive and intelligent. We highlight challenging interactions for users such as vehicle maneuvers in parking areas and specifying drop off points and interesting associations between the agent performance and the automated vehicle abilities.
Published in Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), IEEE 2018
Current automated driving systems assume drivers continuously monitor the vehicle. Meanwhile, fully automated vehicles aim at not requiring human intervention for their safely operation. The industry is currently debating how these novel systems can be certified under functional safety standards. In this paper, we argue that the current safety picture is not comprehensive enough, since it alienates users. We propose experiential safety as a complement to existing functional safety and to develop a framework for experiential safety interactions between the user and automation in automated driving environments. To support the experiential safety design model, we provide an overview of the user-centered research on experiential automation safety, which includes results from online surveys, personal interviews, and gamified group workshops. We explore current user behaviors by focusing on what makes them feel safe as drivers and passengers, and how unexpected events and automation responses might impact their perception of safety. Among the highlighted results, we show how mismatched expectations and unexpected behaviors from autonomous vehicles can lead to frustration and compromised trust. We also show how automation feedback to the user can generate stress and anxiety if not properly configured and how a cooperative relationship between automation and the driver leads to more satisfying driving experiences. Finally, we present guidelines for the experiential safety to be applied by automotive engineers and designers in their development of automated driving technologies.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications AutomotiveUI 2018’, ACM 2018
In-car emotion detection and regulation have become an emerging and important branch of research within the automotive domain. Different emotional states can greatly influence human driving performance and user experience both in manual and automated driving conditions. The monitoring and regulation of relevant emotional states is therefore important to avoid critical driving scenarios with the human driver being in charge, and to ensure comfort and acceptance in autonomous driving. In this workshop we want to discuss the empathic user interface research to address challenges and opportunities and to reveal new research directions for future work. This workshop provides a forum for exchange and discussion on empathic user interfaces, including methods for emotion recognition and regulation, empathic automotive human-machine interaction design, user evaluation and measurements, and subsequent improvement of autonomous driving experience.
Published in ‘Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2018
Abstract not yet available.
Published in ‘Automotive UI 2018’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18)’, ACM 2018
Augmented reality (AR) has the potential to improve road safety, support more immersive (non-) driving related activities, and finally enhance driving experience. AR may also be the enabling technology to help on the transition towards automated driving. However, augmented reality still faces a number of technical challenges when applied in vehicles, and also several human factors issues need to be solved. In this workshop, we will discuss potential and constraints as well as impact, role, and adequacy of AR in driving applications. The primary goal of this workshop is to define a research agenda for the use of AR in intelligent vehicles within the next 3 to 5 years.
Published in ‘Springer Natural Digital Human Modelling’, Springer 2018
As development of automated vehicles and adoption of electric vehicles continue to grow, there is an increasing interest in the public opinions on these technologies. We conducted an international online survey to gather information about people’s hopes and concerns for automated and electric vehicles from a total of 866 people from four countries – Austria, Germany, South Korea, and USA. Results revealed some differences across countries in the perceptions of automated and electric vehicles. However, differences between the same countries have shrunk compared to our previous survey completed in 2012. Results are discussed with limitations and future work.
Published in Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2017
Automated driving systems (ADS) are mainly regarded from an innovation and technology-centered perspective. In academia, as well as in industry, there is a concentration on technical issues to maintain competitiveness while aspects like acceptance, trust and user experience are widely under-researched. However, the “human factor” is critical for a comprehensive establishment of ADS technology on the market. We believe that there is a need to focus on a user-centered design (UCD) perspective to bring ADS innovation to a next level and to achieve a wide acceptance in society. In this workshop we want to discuss special requirements of UCD applied to ADS, to address challenges and opportunities and to reveal new research fields for future work.
Published in ‘Automotive User Interfaces: Creating Interactive Experiences in the Car’, ACM 2017
Informing a driver of a vehicle’s changing state and environment is a major challenge that grows with the introduction of in-vehicle assistant and infotainment systems. Even in the age of automation, the human will need to be in the loop for monitoring, taking over control, or making decisions. In these cases, poorly designed systems could lead to needless attentional demands imparted on the driver, taking it away from the primary driving task. Existing systems are offering simple and often unspecific alerts, leaving the human with the demanding task of identifying, localizing, and understanding the problem. Ideally, such systems should communicate information in a way that conveys its relevance and urgency. Specifically, information useful to promote driver safety should be conveyed as effective calls for action, while information not pertaining to safety (therefore less important) should be conveyed in ways that do not jeopardize driver attention. Adaptive ambient displays and peripheral interactions have the potential to provide superior solutions and could serve to unobtrusively present information, to shift the driver’s attention according to changing task demands, or enable a driver to react without losing the focus on the primary task. In order to build a common understanding across researchers and practitioners from different fields, we held a Workshop on Adaptive Ambient In-Vehicle Displays and Interactions at the AutomotiveUI`15 conference. In this chapter, we discuss the outcomes of this workshop, provide examples of possible applications now or in the future and conclude with challenges in developing or using adaptive ambient interactions.
Published in Automotive User Interfaces: Creating Interactive Experiences in the Car, Springer Book, Springer 2017
In-vehicle experiences are made up mainly of mundane small moments, repeated practices, and taken-for-granted decisions that make up daily experiences in and around private passenger vehicles. Understanding what those experiences are for drivers around the world presents an opportunity for designing novel interactive experiences, technologies, and user interfaces for vehicles. In this chapter, we present a set of tools, methodologies, and practices that will help reader create a holistic design space for future mobility. Transitioning between ethnography, insights, prototyping, experience design, and requirements decomposition is a challenging task even for experienced UX professionals. This chapter provides guidance in this matter with practical examples.
Published in ‘Springer Nature Advances in Human Aspects of Transportation’, Springer 2017
Advancements of in-vehicle technologies and the development of mobile applications that keep a driver connected in a driving environment have caused an increasingly dangerous safety concern. Distracted driving has gained the attention of legislators and governments globally. Countries have constituted bans that partially or fully forbid drivers from using gadgets while driving, especially hindering out-of-the-vehicle communications. This paper introduces Voiceing™, a voice-activated application meant to improve social communications in the car, serving as a safe alternative to distracted driving. Other modalities of interaction such as texting, in-vehicle conversations and outside-of-the-vehicle conversation have been measured and compared with Voiceing™ investigating effects on driver’s performance, cognitive load and user acceptance. Results from this study suggest that Voiceing™ is a safer alternative than in-vehicle interactions with humans. Results also show that natural speech interaction of in-vehicle applications and the inclusion of context awareness help improve driving performance while interacting with a vehicle system.
Published in ‘International Journal of Mobile Human Computer Interaction (IJMHCI)’, 2017
This paper describes the research and development process of an in-vehicle user experience using Skyline, an automotive prototyping platform created in Intel Labs to empower interaction designers and user experience researches to rapidly and iteratively develop and test in-vehicle user experience concepts. The paper describes the hardware and software components of Skyline in depth and how to configure them to suit individual researcher needs. The paper also presents a case study to exemplify the design making process that Skyline enables. From ideation to use-case creation, prototyping and validation through user assessment, the paper showcases the benefits of capturing early qualitative user feedback as support for rapid prototyping walking through a study titled Agency vs. Control and the associated interactions inside the cockpit. Ten defined use-cases are developed and integrated into a hero scenario in Skyline. High fidelity HMI concepts are tested and validated over the course of six months with feedback from a total of fifty users.
Published in ‘Automotive user interfaces: creating interactive experiences in the car’, 2017
Given the rapid advancement of technologies in the automotive domain, driver–vehicle interaction has recently become more and more complicated. The amount of research applied to the vehicle cockpit is increasing, with the advent of (highly) automated driving, as the range of interaction that is possible in a driving vehicle expands. However, as opportunities increase, so does the number of challenges that automotive user experience designers and researchers will face. This chapter focuses on the instrumentation of sensing and displaying techniques and technologies to make better user experience while driving. In the driver–vehicle interaction loop, the vehicle can sense driver states, analyze, estimate, and model the data, and then display it through the appropriate channels for intervention purposes. To improve the interaction, a huge number of new/affordable sensing (EEG, fNIRS, IR imaging) and feedback (head-up displays, auditory feedback, tactile arrays, etc.) techniques have been introduced. However, little research has attempted to investigate this area in a systematic way. This chapter provides an overview of recent advances of input and output modalities to be used for timely, appropriate driver–vehicle interaction. After outlining relevant background, we provide information on the best-known practices for input and output modalities based on the exchange results from the workshop on practical experiences for measuring and modeling drivers and driver–vehicle interactions at AutomotiveUI 2015. This chapter can help answer research questions on how to instrument a driving simulator or realistic study to gather data and how to place interaction outputs to enable appropriate driver interactions.
Published in ‘Proceeding of Automotive UI 2017’, ACM 2017
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’16)’, ACM 2016
Automotive user experiences can be increasingly personalized and adaptive thanks to advances in in-vehicle sensors and user modelling but current automotive software development frameworks still require large software development efforts to create custom interaction solutions. In this paper we propose a novel system architecture aimed at supporting automotive researchers and designers by simplifying the prototyping process towards novel adaptive user interfaces. We describe the integration of RealSense sensors and the Context Sensing SDK with the Skyline driving simulator framework. The combination of these tools allows rapid prototyping of in-cabin context aware interactions. The paper presents two use cases of in-cabin-aware prototypes, a user profile loading interface that recognizes identities and occupant roles and an L4 to L3 take-over control interface using RealSense and Context sensing APIs to detect in-vehicle events and Skyline to present real-time adaptive warning interfaces. The resulting experiences are core components of an intelligent ADAS framework for research of IVI personalization and highly automated collaborative driving.
Published in Dagstuhl Reports, Dagtsuhl 2016
The next big change in the automotive domain will be the move towards automated and semi-automated driving. We can expect an increasing level of autonomous driving in the coming years, resulting in new opportunities for the car as an infotainment platform when standard driving tasks will be automated. This change also comes with a number of challenges to automotive user interfaces. Core challenges for the assistance system and the user interface will be distributing tasks between the assistance system and the driver, the re-engagement of drivers in semi-automated driving back to the driving task, and collaborative driving in which cars collectively work together (e.g., platoons). Overall, in the coming years we will need to design interfaces and applications that make driving safe while enabling communication, work, and play in human-operated vehicles. This Dagstuhl seminar brought together researchers from human computer interaction, cognitive psychology, human factors psychology and also from automotive industry and OEMs to discuss the new interface paradigms for (semi-)automated driving.
Published in Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2016
This workshop will focus on the problem of occupant and vehicle situational awareness with respect to automated vehicles when the driver must take over control. It will explore the future of fully automated and mixed traffic situations where vehicles are assumed to be operating at level 3 or above. In this case, all critical driving functions will be handled by the vehicle with the possibility of transitions between manual and automated driving modes at any time. This creates a driver environment where, unlike manual driving, there is no direct intrinsic motivation for the driver to be aware of the traffic situation at all times. Therefore, it is highly likely that when such a transition occurs, the driver will not be able to transition either safely or within an appropriate period of time. This workshop will address this challenge by inviting experts and practitioners from the automotive and related domains to explore concepts and solutions to increase, maintain and transfer situational awareness in semi-automated vehicles.
Published in * Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications*, ACM 2016
On July 1st 2016, the first automated vehicle fatality became headline news [9] and caused a nationwide wave of concern. Now we have at least one situation in which a controlled automated vehicle system failed to detect a life threatening situation. The question still remains: How can an autonomous system make ethical decisions that involve human lives? Control negotiation strategies require prior encoding of ethical conventions into decision making algorithms, which is not at all an easy task – especially considering that actually coming up with ethically sound decision strategies in the first place is often very difficult, even for human agents. This workshop seeks to provide a forum for experts across different backgrounds to voice and formalize the ethical aspects of automotive user interfaces in the context of automated driving. The goal is to derive working principles that will guide shared decision-making between human drivers and their automated vehicles.
Published in Proceedings of Automotive UI 2015, ACM 2015
The search term “driver-vehicle interaction study” results in2,690 Google Scholar hits of research papers published inthe past 5 years (2010-2015). This huge number clearlypoints out the problem that researchers (particularly, new tothis field) are exposed to, namely that many decisionsregarding the setting, (e.g., lab/field, low-/high-fidelitysimulator, within/between subjects, sample size, biasedsubject, learning effect, sensor technology, mobilehardware, synchronization issues, briefing, etc.) have to beestablished early in the design phase without the referenceof principled guidelines and best practices to support themin identifying the optimal solution to answer their researchquestion of interest. This workshop invites a) people activein the field to share their experiences in executing studies tomeasure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draftresearch questions, present their problems, and discusspossible solutions with the other participants.
Published in Proceedings of Automotive UI 2015, ACM 2015
A major challenge in today’s as well as future driving is to keep drivers informed about the vehicle’s state and the environment. Today’s assistant and infotainment systems compete for the drivers’ attention and may even distract them from the primary driving task. Further, with an increase in automation, the vehicle needs to be able to communicate information with different urgency levels. While some information are not important and should never distract a driver from important tasks, there are also calls for action, which a driver should not be able to ignore. We believe in adaptive ambient displays and peripheral interaction as one possible way to unobtrusively present information while being able to switch the driver’s attention if needed. In this workshop the focus lies in exchange of best known methods and discussion on challenges and potentials for this kind of interaction in today’s scenarios as well as in future mixed or full autonomous traffic. The central objective of this workshop is to bring together researchers from different domains and discuss radical, innovative, and engaging ideas and a future landscape for research in this area.
Published in ‘AutomotiveUI 2015’, 2015
The search term “driver-vehicle interaction study” results in 2,690 Google Scholar hits of research papers published in the past 5 years (2010-2015). This huge number clearly points out the problem that researchers (particularly, new to this field) are exposed to, namely that many decisions regarding the setting, (e.g., lab/field, low-/high-fidelity simulator, within/between subjects, sample size, biased subject, learning effect, sensor technology, mobile hardware, synchronization issues, briefing, etc.) have to be established early in the design phase without the reference of principled guidelines and best practices to support the min identifying the optimal solution to answer their research question of interest. This workshop invites a) people activein the field to share their experiences in executing studies to measure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draft research questions, present their problems, and discuss possible solutions with the other participants.
Published in ‘Adjunct Proceedings AutomotiveUI ’15’, ACM 2015
As driving is mainly a visual task, auditory displays play a critical role for in-vehicle interactions. To improve invehicle auditory interactions to the advanced level, auditory display researchers and automotive user interface researchers came together to discuss this timely topic at an in-vehicle auditory interactions workshop at the International Conference on Auditory Display (ICAD). The present paper reports discussion outcomes from the workshop for more discussions at the AutoUI conference.
Published in ‘Extended Proceedings of the 7th International Conference on Automotive User’, 2015
This paper outlines and evaluates experiential prototyping for emerging vehicle UX design within a pedagogical framework. Drawing from studio experience, we discuss the learnings, options and risks that in-vehicle UX designers face in prototyping realtime, adaptive user interfaces, and suggest methods and solutions for designers wishing to expand their creative practice.
Published in ‘International journal of human-computer studies’, Elsevier 2015
The growing advancements of in-vehicle electronics and the intrusion of consumer electronics in the vehicle cockpit have increased the complexity of in-car experiences. Therefore, vehicle manuals are needed, now more than ever, to provide information and guidance. Automakers have extended user assistance through multimedia, integrated manuals, online services and telephonic assistance. However, no driver-centric interfaces have been created to provide vehicle documentation assistance effectively. Drivers are expected to interrupt the driving experience in order to find vehicle information in a paper manual. This paper compares the effects on driving performance and cognitive load when consulting a manual in a simulated driving environment through various conditions. These conditions consist of interacting with a voice activated vehicle manual called the Voice User Help, an on-board multimedia manual, a passenger, and a call center. Results suggest that any kind of interaction to access information while driving has an impact on the driver׳s attention based on a decrease in driving performance and increase of cognitive load. However, amongst all modalities, voice interfaces seem to be the better option for consulting information while driving. Also, and under some circumstances, interaction with a conversational manual system appears to be safer than human-to-human communication.
Published in ‘Pervasive and Mobile Computing’, 2014
Research on next generation automotive ICT is challenged by the complex interactions of technological advancements and the social nature of individuals using and adopting technology. Traffic in the future will no longer be considered as a network of individually behaving “dumb” cars, but rather as the entirety of social interactions between its entities. Successful application of collective, socially inspired driving mechanisms requires to understand how socially-inspired vehicles (i.e., driver-car pairs) could make use of their social habitus, composed from (past and present) driving behavior, social interactions with pedestrians, vehicles, infrastructure, etc., and drivers’ vital states when exposed to other road participants in live traffic. In response to this emerging research direction, the aim of this workshop is to achieve a common understanding of the symbiosis between drivers, cars, and infrastructure from a global point of view (referred to as “collective driving”). In particular, this workshop is expected to provoke an active debate on the adequacy of the concept of socializing cars, addressing questions such as who can communicate what, when, how, and why?
Published in ‘Proceedings of AutomotiveUI 2014’, 2014
A major challenge in the future of traffic is to understand how “socially-aware vehicles” could be making use of their social habitus, formed by any information that can be inferred from past and present social relations, social interactions, and a driver’s social state when exposed to other participants in real, live traffic. The aim of this workshop in recognition of this challenge is to advance on a common understanding of the symbiosis between drivers, cars, and the infrastructure. The central objective of the workshop is to provoke an active debate on the adequacy of the concept of social, natural, and peripheral interaction, addressing questions such as “who can communicate what”, “when”, “how”, and “why”? To tackle these questions, we would like to collect different, radical, innovative, versatile, and engaging works that challenge or re-imagine human interactions in the near future automobile space.
Published in Jouarnal or Ergonomics, Taylor & Francis 2012
Abstract not available
Not available
Published in Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Springer 2012
The rapid advancement of vehicular technologies has resulted in an exponential increase of new vehicle functions road assistance and connected vehicles services. Vehicle manuals are designed to provide support and information about the use and maintenance of these features. However, current vehicle user manuals do not allow looking for information under driving conditions. This paper presents the Voice User Help, a smart voice-operated system that utilizes natural language understanding and emotional adaptive interfaces to assist drivers when looking for vehicle information with minimal effect on their driving performance. Additionally, the system presents an opportunity for elder drivers to reduce the learning curve of new in-vehicle technologies and improve efficiency. Results on user acceptance of the Voice User Help, as well as cognitive load and driver distraction effects generated during a simulated drive indicate that the Voice User help is an extremely desirable feature and potentially safe application since it did not significantly decrement driving performance. Furthermore preliminary results on adaptive voice interfaces using emotion recognition indicate that personalization of the interaction will be able to palliate possible negative effects that happen during system error recovery.
Published in Journal of Ergonomics, Taylor & Francis Online 2012
The use of brain computer interface (BCI) devices in research and applications has exploded in recent years. Applications such as lie detectors that use functional magnetic resonance imaging (fMRI) to video games controlled using electroencephalography (EEG) are currently in use. These developments, coupled with the emergence of inexpensive commercial BCI headsets, such as the Emotiv EPOC ( http://emotiv.com/index.php) and the Neurosky MindWave, have also highlighted the need of performing basic ergonomics research since such devices have usability issues, such as comfort during prolonged use, and reduced performance for individuals with common physical attributes, such as long or coarse hair. This paper examines the feasibility of using consumer BCIs in scientific research. In particular, we compare user comfort, experiment preparation time, signal reliability and ease of use in light of individual differences among subjects for two commercially available hardware devices, the Emotiv EPOC and the Neurosky MindWave. Based on these results, we suggest some basic considerations for selecting a commercial BCI for research and experimentation.
Statement of Relevance: Despite increased usage, few studies have examined the usability of commercial BCI hardware. This study assesses usability and experimentation factors of two commercial BCI models, for the purpose of creating basic guidelines for increased usability. Finding that more sensors can be less comfortable and accurate than devices with fewer sensors.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 2012)’, 2012
Automotive Natural User Interfaces have the potential to increase user experience providing intuitive interactions for drivers. However, in the complex setting of a driving vehicle, failed interactions with in-vehicle technology can lead to frustration and put drivers in a dangerous situation. This paper evaluates the possibility of applying emotion recognition to vehicular spoken dialogue systems in order to adapt the dialog strategies, in error recovery scenarios. An emotional taxonomy is developed for the interactions with a conversational vehicular application, the Voice User Help. The positive results of the performance of VUH emotion recognizer support the creation of real-time classification of the user emotional state, which serves as basis to emotional reappraisal dialog strategies that mitigate negative effects on the driver’s cognitive load and driver performance.
Published in EHU Scientific Production Portal, EHU 2012
This thesis presents the design and development of the Conversational Automotive Assistant, Voice User Help, a conversational system based on the question-answer paradigm and designed to consult vehicle documentation while driving. This work compiles research in the fields of technical documentation, information retrieval, natural language processing, vehicle user interface design, user experience, and affective computing with the goal of creating an adaptive and dynamic assistant that modifies its conversational behavior depending on the user’s emotional state.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces, ACM 2012
Natural user interfaces—generally based on gesture and speech interaction—are an increasingly hot topic in research and are already being applied in a multitude of commercial products. Most use cases currently involve consumer electronics devices like smart phones, tablets, TV sets, game consoles, or large-screen tabletop computers.Motivated by the latest results in those areas, our vision is to apply natural user interfaces, for example gesture and conversational speech interaction, to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand might allow the design of new user experiences for infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces and to continue the fruitful discussions held at the 1st Workshop on Automotive Natural User Interfaces from AutomotiveUI ’11 in Salzburg, Austria. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in Proceedings of Interact 2011, 2011
Voice-interfaced, in-vehicle assistance includes receiving a Voice-based query from a user in the vehicle, and then determining at least one of a user emotional state, user expertise level and speech recognition confidence level associated with the Voice-based query. A text-based query may then be derived from the Voice-based query, and used to search a help database for answers corresponding to the Voice-based query. At least one response is then provided to the user in the form of Voice-based assistance in accordance with at least one of the user emotional state, user expertise level and speech recognition confidence level.
Published in Adjunct Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2011
The current growth of automotive electronics aims toextend vehicle functionality and information access. Thispaper explores the application of Natural Voice UserInterfaces as a preferred interaction modality with in-vehicle technologies to lower driver distraction effects andimprove the user experience. The benefits and risks ofnatural speech interactions are evaluated in order topropose a driver-centric design guideline based on previousresearch. The paper concludes that driving scenarios canprofit considerably from systems that apply natural speechinterfaces to allow the driver to access information.
Published in ‘Proceedings of AutomotiveUI 2011’, ACM 2011
Natural user interfaces by means of gesture and speech interaction have become a hot topic in research as well as already for real products. Most use cases currently center around consumer electronics devices like smart phones, TV sets, gaming, or other large screens like tabletops. Motivated by the latest results in those areas, our vision is to apply natural user interfaces like gesture and speech interaction to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand allow to design new experiences for operating infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in ‘International Journal of Learning Technology’, 2011
This paper investigates the benefits of learning from educational video games compared to learning by reading from a text document. The participants were exposed to Lewis and Clark expedition via a video game or text document. During the learning task, playing the game or reading, participants wore a Brain Computer Interface (BCI) device to gather their level of engagement. After the learning sessions, post-experiment questionnaires were used to assess the amount of information retained after each session. The results of this study suggests that the educational video games might not be significantly engaging, and also that learning by reading a handout may be better for retaining information. Furthermore, this paper briefly discusses the BCI device, and how it can be used to measure engagement of the participants.
Published in Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2010
Manuals were designed to provide support and information about the usage and maintenance of the vehicle. In many cases user’s manuals are the driver’s only guidance. However, lack of clarity and efficiency of manuals lead to user dissatisfaction. In vehicles this problem is even more crucial given that driving a motor vehicle is, for many people, the most complex and potentially dangerous task they will perform during their lifetime. In this paper we present a voice interfaced driver manual that can potentially fix the deficiencies of its alternatives. In addition we aim to provide a case for the integration of such technology in a vehicle to reduce driver distraction, increase driver satisfaction, and manual usability, while also benefiting Original Equipment Manufacturers (OEMs) in lowering costs and reducing the documentation process.
Technology Executive | Automotive & AI Leader
📍 Based in Germany · Open to Relocation Globally
Technology Executive with a track record of CTO-level impact in the Automotive & AI sectors. Proven leader with 15+ years of experience architecting and scaling intelligent systems from R&D to series production, driving 30% YoY R&D ROI amidst budget reductions, leading global R&D organizations of 100+ engineers, and launching platforms adopted by 1M+ users. Expert in defining technical vision that aligns with C-suite objectives, secures market leadership, and generates massive IP value (150+ patents).
Technische Hochschule Ingolstadt
2025–Present
Establish and lead cutting-edge research initiatives in human-centered intelligent vehicles while securing substantial funding and building academic-industry partnerships.
Secured €3M grant from the High-Tech Agenda Program of the Government of Bavaria to develop comprehensive research programs in AI and Automotive. Established THI Doctoral School membership and developed advanced curriculum for Automotive AI Masters and User Experience Design programs.
Successfully positioned THI as a leading European research institution in AI and Automotive, with substantial funding secured and advanced educational programs established across Computer Science and Engineering faculties.
Intel Corporation – Intel Labs
2021–2025
Maximize R&D value and strategic impact while managing 8% yearly budget reductions across Intel Labs' global engineering organization, requiring innovative approaches to resource optimization and strategic technology investments.
Established unified research strategies and cross-functional collaboration across Intel Labs' 500+ person global engineering organization. Steered autonomous driving R&D strategy aligning 100+ multi-regional engineering resources. Served as key technology advisor for M&A, divestiture, and IPO activities within the automotive sector.
Achieved average 30% YoY increase in R&D ROI, reversing the impact of budget cuts across semiconductor design, packaging, systems, networking, software, algorithmic development and AI. Successfully architected and deployed production-grade automated driving safety systems, reducing validation cycles by ~20% and accelerating compliance with emerging safety regulations.
Intel Corporation – Intel Labs
2014–2021
Develop and commercialize a comprehensive multimodal in-vehicle R&D platform that integrates cutting-edge technologies while establishing Intel as a leading automotive technology partner and securing substantial research funding.
Led cross-institutional research collaborations, securing $5M+ in funding and partnerships. Transferred multiple key technologies to Intel's and Mobileye product teams. Led open-source contributions to industry bodies and international standards, bridging research to real-world impact.
Successfully deployed "Skyline" platform across 10+ global automotive OEMs, showcased at international forums (Google IO, Intel 360). Secured 50+ granted patents and 100+ pending in autonomous systems, AI and robotics. Published 70+ papers and built thought leadership in automotive AI safety and HMI.
BMW Group
2012–2014
Lead rapid expansion into Asia-Pacific's fastest-growing automotive market while ensuring 24/7 reliability and scalability of connected vehicle services during record growth, and differentiate BMW in a competitive luxury market through innovative in-car technology.
Managed 100+ IT engineering division across Asia-Pacific, overseeing data centers, telematics, and in-car digital services. Pioneered in-car voice and AI assistants, collaborating with partners like Nuance and Microsoft. Developed integrated multimodal user manual for BMW 7 series.
Achieved over 1 million new users in the first year, significantly enhancing customer engagement. Launched industry's first natural-language voice assistant and multimodal user manual, setting new standards for in-vehicle HMI and earning industry-wide commendations for innovation.
BMW IT Research Center and Clemson University, I-CAR
2009–2012
Develop cutting-edge automotive technology prototypes that can inform future product roadmaps while bridging academic research with commercial applications in the automotive industry.
Collaborated between BMW Technology Office USA and Clemson University to develop functional prototypes for location-based services, voice-activated navigation, augmented reality user manuals, and driver assistance systems.
Successfully created first proofs-of-concept that informed future BMW product roadmaps, establishing foundational technologies for connected vehicle services and advanced driver assistance systems.
Holder of 150+ patents (50+ granted) in autonomous systems, AI, and robotics, shaping the core IP strategy for market-leading mobility solutions.
View Patent PortfolioAuthor of 70+ publications in top-tier IEEE and ACM venues and editor of multiple books on autonomous system engineering.
View PublicationsKey contributor to the definition of global safety and communication standards for autonomous vehicles through leadership roles in IEEE and ETSI.
View Standards WorkUniversity of the Basque Country, Spain & Clemson University, USA, 2012
Summa Cum Laude
Joint international doctoral program focusing on conversational AI for vehicles.
Hochschule Offenburg, Germany, 2009
Coursework in multimedia systems and human-computer interaction.
University of Burgos, Spain, 2006
Summa Cum Laude
Minor in Telecommunications.
This map is generated from a Jupyter Notebook file in /_talks/talkmap.ipynb, which mines the location fields in the .md files in _talks/.
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Human-Computer Interfaces for Speech Applications.
Published in: Patent Office Authors: Shelby Solomon Darnell et al. Citations: 0
Voice-interfaced in-vehicle assistance
Published in: Patent Office Authors: Hans-Peter Fischer, Ignacio Alvarez Citations: 26
Generating voxel representations and assigning trust metrics for ensuring veracity for use with multiple applications
Published in: Patent Office Authors: Robert Adams et al. Citations: 7
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 8
Controller and interface for vehicle seat
Published in: Patent Office Authors: James T Hotary, Ignacio Alvarez, Brian R Dexter Citations: 15
Generating three dimensional models using single two dimensional images
Published in: Patent Office Authors: David I Gonzalez Aguirre, Javier Felip Leon, Ignacio J Alvarez Citations: 4
Realistic sensor simulation and probabilistic measurement correction
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 4
Response of vulnerable road users to visual information from autonomous vehicles in shared spaces
Published in: Patent Office Authors: Walter Morales Alvarez et al. Citations: 31
Technologies for autonomous three-dimensional modeling
Published in: Patent Office Authors: Javier Felip Leon, David I Gonzalez Aguirre, Ignacio J Alvarez Citations: 0
Technologies for contextual natural language generation in a vehicle
Published in: Patent Office Authors: Jesus Gonzalez, Ignacio Alvarez Citations: 11
Trusted vehicle messaging via transparent display
Published in: Patent Office Authors: Darrell Norman LeBlanc et al. Citations: 16
Trusted vehicle telematics using blockchain data analytics
Published in: Patent Office Authors: Ignacio Alvarez, Mic Bowman Citations: 112
10 Driver Capabilities in the Resumption of Control
Published in: Patent Office Authors: Sherrilene Classen, Liliana Alvarez Citations: 4
3D scene reconstruction using shared semantic knowledge
Published in: Patent Office Authors: Ignacio J Alvarez, Ranganath Krishnan Citations: 0
Accessibility method and apparatus for autonomous/semi-autonomous driving
Published in: Patent Office Authors: Ignacio J Alvarez, Joshua Ekandem Citations: 4
Distributed traffic safety consensus
Published in: Patent Office Authors: Ignacio J Alvarez, Rafael Misoczki, Andrea Miele Citations: 27
High-fidelity 3D reconstruction using facial features lookup and skeletal poses in voxel models
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 14
Method and device for determining a configuration for an autonomous vehicle
Published in: Patent Office Authors: Alena Rodionova, Ignacio Alvarez Citations: 8
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 12
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 14
Technology to apply driving norms for automated vehicle behavior prediction
Published in: Patent Office Authors: Guixiang Ma et al. Citations: 12
Use of temporal motion vectors for 3D reconstruction
Published in: Patent Office Authors: Sridhar Uyyala et al. Citations: 0
An online safety guard for intelligent transportation systems
Published in: Patent Office Authors: Bernd Gassmann et al. Citations: 4
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 21
Collaborative safety driving model for autonomous vehicles
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 8
Crowdsourced detection, identification and sharing of hazardous road objects in HD maps
Published in: Patent Office Authors: SM Iftekharul Alam et al. Citations: 40
Detection and mitigation of inappropriate behaviors of autonomous vehicle passengers
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 4
Disambiguation of vehicle navigation actions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Driver and environment monitoring to predict human driving maneuvers and reduce human driving errors
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 12
Driver monitoring system (dms) data management
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 16
Emotional adaptive driving policies for automated driving vehicles
Published in: Patent Office Authors: Jennifer Healey, Victor Palacios Rivera, Ignacio Alvarez Citations: 70
Environment specific model delivery
Published in: Patent Office Authors: Juan Munoz et al. Citations: 1
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Infrastructure assisted efficient collective perception service for connected vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 7
Methods and apparatus to automatically generate code for graphical user interfaces
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 29
Methods and apparatus to implement a neural network
Published in: Patent Office Authors: Javier Sebastian Turek et al. Citations: 1
Methods and devices for a road user
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 4
Methods and devices for a vehicle
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 5
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 4
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 3
Obstacle representation display
Published in: Patent Office Authors: Ignacio Alvarez, Fabricio Novak, Marina Tereza Weishaupt Strano Citations: 0
Optimizing charging, fueling, and parking overheads of fleet vehicles in a maas architecture
Published in: Patent Office Authors: Juan Pablo Munoz et al. Citations: 27
Rogue vehicle detection and avoidance
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 33
Self-adaptive multiresolution digital-plate for multimodal enhanced safety of vehicles
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 4
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 26
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems, methods, and devices for generating and using safety threat maps
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 1
Technologies for labeling and validating human-machine interface high definition-map data
Published in: Patent Office Authors: Domingo Gonzalez et al. Citations: 1
Apparatus and methods for industrial robot code recommendation
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 3
Apparatus and methods for object manipulation via action sequence optimization
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Autonomous vehicle system
Published in: Patent Office Authors: Hassnaa Moustafa et al. Citations: 216
Collaborative 3-D environment map for computer-assisted or autonomous driving vehicles
Published in: Patent Office Authors: Sridhar G Sharma et al. Citations: 14
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 9
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 16
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 23
Driving safety systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 6
Hardware based abstraction sharing of hardware devices across computing platforms
Published in: Patent Office Authors: Mohammad R Haghighat et al. Citations: 0
Heterogeneous compute architecture hardware/software co-design for autonomous driving
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
In-cabin acoustic-based passenger occupancy and situation state assessment
Published in: Patent Office Authors: Julio ZAMORA ESQUIVEL et al. Citations: 0
Methods and apparatus to calibrate error aligned uncertainty for regression and continuous structured prediction tasks
Published in: Patent Office Authors: Neslihan Kose Cihangir et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 8
Methods and apparatus to update autonomous vehicle perspectives
Published in: Patent Office Authors: Sara Baghsorkhi et al. Citations: 39
Methods and devices for determining an action in the presence of road users
Published in: Patent Office Authors: Fabian Oboril et al. Citations: 1
Multimodal automatic mapping of sensing defects to task-specific error measurement
Published in: Patent Office Authors: Maria Soledad Elli et al. Citations: 1
Multimodal sensing in autonomous driving vehicles with self-healing capabilities
Published in: Patent Office Authors: David Arditti Ilitzky et al. Citations: 4
Quantitative driving evaluation and vehicle safety restrictions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 11
Safety system, automated driving system, and methods thereof
Published in: Patent Office Authors: Cornelius Buerkle, Fabian Oboril, Ignacio Alvarez Citations: 0
Safety system for a vehicle
Published in: Patent Office Authors: David Israel GONZÁLEZ AGUIRRE et al. Citations: 1
System and method for acceleration-based vector field maps
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 34
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Systems and methods for determining a configuration for a microarchitecture
Published in: Patent Office Authors: Javier Sebastián Turek et al. Citations: 0
Systems, devices, and methods involving driving systems
Published in: Patent Office Authors: Florian Geissler et al. Citations: 0
Technologies for enabling collective perception in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 11
Technologies for intelligent traffic optimization with high-definition maps
Published in: Patent Office Authors: Mehrnaz Khodam Hazrati et al. Citations: 0
Technology to handle ambiguity in automated control systems
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 1
Technology to support the coexistence of multiple independent lidar sensors
Published in: Patent Office Authors: Alexander Marshall Merritt et al. Citations: 0
Vulnerable road user safety technologies based on responsibility sensitive safety
Published in: Patent Office Authors: Vesh Raj Sharma Banjade et al. Citations: 24
A vision-based approach for unmanned aerial vehicles to track industrial pipes for inspection tasks
Published in: Patent Office Authors: Sara Roos-Hoefgeest et al. Citations: 12
Automated network control systems that adapt network configurations based on the local network environment
Published in: Patent Office Authors: Javier Perez-Ramirez et al. Citations: 0
Automatic robot perception programming by imitation learning
Published in: Patent Office Authors: David I Gonzalez Aguirre et al. Citations: 11
Autonomous vehicle system for detecting safety driving model compliance status of another vehicle, and planning accordingly
Published in: Patent Office Authors: Javier Turek et al. Citations: 0
Driving surface protrusion pattern detection for autonomous vehicles
Published in: Patent Office Authors: Jose Rodrigo Camacho Perez et al. Citations: 3
Edge-centric techniques and technologies for monitoring electric vehicles
Published in: Patent Office Authors: Arvind Merwaday et al. Citations: 5
Enhanced operational domain monitoring and visualization systems and methods
Published in: Patent Office Authors: Ignacio J Alvarez, Yang Liu, Fabricio Novak Citations: 3
Methods and apparatus to develop in-vehicle experiences in simulated environments
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Methods and apparatus to facilitate generation of database queries
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 2
Methods and apparatus to generate vehicle warnings
Published in: Patent Office Authors: Sridhar Sharma et al. Citations: 0
Methods and apparatus to provide accident avoidance information to passengers of autonomous vehicles
Published in: Patent Office Authors: Matt Yurdana, John Weast, Ignacio Alvarez Citations: 0
Methods and apparatus to provide machine programmed creative support to a user
Published in: Patent Office Authors: Ignacio Javier Alvarez et al. Citations: 0
Methods and arrangements to identify activation profile context in training data
Published in: Patent Office Authors: Glen J Anderson et al. Citations: 5
Methods and devices for vehicle safety mechanisms
Published in: Patent Office Authors: Alexander Carl Unnervik et al. Citations: 1
Real-time localization error correction of autonomous vehicle
Published in: Patent Office Authors: LIU Xiaolong et al. Citations: 2
Sensor calibration and sensor calibration detection
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 25
System and method for emergency braking
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 8
Systems, methods, and devices for driving control
Published in: Patent Office Authors: Deepak Dasalukunte et al. Citations: 34
Technology to generalize safe driving experiences for automated vehicle behavior prediction
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 9
Trusted lightweight communication in cloud robotics
Published in: Patent Office Authors: Amr Mokhtar, Hassnaa Moustafa, Ignacio J Alvarez Citations: 0
Affordance-aware, multi-resolution, free-form object manipulation planning
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 1
Automatically verifying vehicle identity and validating vehicle presence
Published in: Patent Office Authors: Moreno Ambrosin et al. Citations: 0
Compensating for a sensor deficiency in a heterogeneous sensor array
Published in: Patent Office Authors: Ignacio Alvarez et al. Citations: 0
Controller for an autonomous vehicle, and network component
Published in: Patent Office Authors: Rafael Rosales et al. Citations: 0
Device and method for route planning
Published in: Patent Office Authors: Yuqing Hou et al. Citations: 1
Devices and methods for updating maps in autonomous driving systems in bandwidth constrained networks
Published in: Patent Office Authors: Richard Dorrance et al. Citations: 0
Geographic heat or cold distribution model
Published in: Patent Office Authors: Cornelius Buerkle et al. Citations: 0
High dynamic range imaging using external light source
Published in: Patent Office Authors: Michael Paulitsch et al. Citations: 0
Methods and apparatus to generate acceptability criteria for autonomous systems plans
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Methods and Tools for the Engineering and Assurance of Safe Autonomous Systems (Dagstuhl Seminar 24151)
Published in: Dagstuhl Reports Authors: Elena Troubitsyna et al. Citations: 0
Methods, apparatus, systems and articles of manufacture for providing query selection systems
Published in: Patent Office Authors: Luis Carlos Maria Remis et al. Citations: 0
Methods, systems and apparatus to improve spatial-temporal data management
Published in: Patent Office Authors: David I Gonzalez Aguirre, Ignacio J Alvarez, Javier Felip Leon Citations: 0
Liuyang Yang et al.
No venue listed (2024)
Neural network verification based on cognitive trajectories
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 0
Personalized mobility as a service
Published in: Patent Office Authors: Nesreen K Ahmed et al. Citations: 1
Robotic manipulation planning based on probalistic elastoplastic deformation material point method
Published in: Patent Office Authors: Javier Felip Leon et al. Citations: 2
Robust multimodal sensor fusion for autonomous driving vehicles
Published in: Patent Office Authors: Nilesh Ahuja et al. Citations: 1
Safety system for a vehicle
Published in: Patent Office Authors: David Israel Gonzalez Aguirre et al. Citations: 0
Scalable Digital Twin Services for intelligent transport systems (ITS) with Optimized Communication and Dynamic Resource Adaptation
Published in: Patent Office Authors: Ned M Smith et al. Citations: 0
Simulated vehicle operation modeling with real vehicle profiles
Published in: Patent Office Authors: Ignacio Alvarez, Victor Palacios Rivera Citations: 0
Systems and methods for intrusion detection in vehicle systems
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 12
Time of flight distance determinations
Published in: Patent Office Authors: Shabbir Ahmed et al. Citations: 0
Autonomous vehicle perception multimodal sensor data management
Published in: Patent Office Authors: Julio Fernando Jarquin Arroyo et al. Citations: 1
Blind spot based risk assessment of road maneuvers
Published in: Patent Office Authors: Rafael Rosales, Ignacio J Alvarez, Michael Paulitsch Citations: 0
Generation of spatial sound signal from auditory perspective of individual
Published in: Patent Office Authors: Rafael Rosales, Ignacio Alvarez, Willem Beltman Citations: 0
Handover assistant for machine to driver transitions
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 5
Maneuver coordination service in vehicular networks
Published in: Patent Office Authors: Satish C Jha et al. Citations: 31
Methods and devices for an occupant of a vehicle
Published in: Patent Office Authors: Neslihan KOSE CIHANGIR et al. Citations: 0
Monitoring and scoring passenger attention
Published in: Patent Office Authors: Ignacio J Alvarez et al. Citations: 0
Safe and scalable model for culturally sensitive driving by automated vehicles
Published in: Patent Office Authors: John Weast et al. Citations: 0
Systems and methods for brokering peer-assisted safety models for autonomous and assisted-driving vehicles
Published in: Patent Office Authors: Amar Srivastava et al. Citations: 1
Systems and methods for privacy-preserving facemask-compliance-level measurement
Published in: Patent Office Authors: David Gonzalez Aguirre et al. Citations: 2
Systems and methods for vehicle-occupancy-based and user-preference-based smart routing and autonomous volumetric-occupancy measurement
Published in: Patent Office Authors: Francesc Guim Bernat et al. Citations: 0
This is an item in your portfolio. It can be have images or nice text. If you name the file .md, it will be parsed as markdown. If you name the file .html, it will be parsed as HTML.
Published in Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2010
Manuals were designed to provide support and information about the usage and maintenance of the vehicle. In many cases user’s manuals are the driver’s only guidance. However, lack of clarity and efficiency of manuals lead to user dissatisfaction. In vehicles this problem is even more crucial given that driving a motor vehicle is, for many people, the most complex and potentially dangerous task they will perform during their lifetime. In this paper we present a voice interfaced driver manual that can potentially fix the deficiencies of its alternatives. In addition we aim to provide a case for the integration of such technology in a vehicle to reduce driver distraction, increase driver satisfaction, and manual usability, while also benefiting Original Equipment Manufacturers (OEMs) in lowering costs and reducing the documentation process.
Published in ‘International Journal of Learning Technology’, 2011
This paper investigates the benefits of learning from educational video games compared to learning by reading from a text document. The participants were exposed to Lewis and Clark expedition via a video game or text document. During the learning task, playing the game or reading, participants wore a Brain Computer Interface (BCI) device to gather their level of engagement. After the learning sessions, post-experiment questionnaires were used to assess the amount of information retained after each session. The results of this study suggests that the educational video games might not be significantly engaging, and also that learning by reading a handout may be better for retaining information. Furthermore, this paper briefly discusses the BCI device, and how it can be used to measure engagement of the participants.
Published in ‘Proceedings of AutomotiveUI 2011’, ACM 2011
Natural user interfaces by means of gesture and speech interaction have become a hot topic in research as well as already for real products. Most use cases currently center around consumer electronics devices like smart phones, TV sets, gaming, or other large screens like tabletops. Motivated by the latest results in those areas, our vision is to apply natural user interfaces like gesture and speech interaction to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand allow to design new experiences for operating infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in Adjunct Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2011
The current growth of automotive electronics aims toextend vehicle functionality and information access. Thispaper explores the application of Natural Voice UserInterfaces as a preferred interaction modality with in-vehicle technologies to lower driver distraction effects andimprove the user experience. The benefits and risks ofnatural speech interactions are evaluated in order topropose a driver-centric design guideline based on previousresearch. The paper concludes that driving scenarios canprofit considerably from systems that apply natural speechinterfaces to allow the driver to access information.
Published in Proceedings of Interact 2011, 2011
Voice-interfaced, in-vehicle assistance includes receiving a Voice-based query from a user in the vehicle, and then determining at least one of a user emotional state, user expertise level and speech recognition confidence level associated with the Voice-based query. A text-based query may then be derived from the Voice-based query, and used to search a help database for answers corresponding to the Voice-based query. At least one response is then provided to the user in the form of Voice-based assistance in accordance with at least one of the user emotional state, user expertise level and speech recognition confidence level.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces, ACM 2012
Natural user interfaces—generally based on gesture and speech interaction—are an increasingly hot topic in research and are already being applied in a multitude of commercial products. Most use cases currently involve consumer electronics devices like smart phones, tablets, TV sets, game consoles, or large-screen tabletop computers.Motivated by the latest results in those areas, our vision is to apply natural user interfaces, for example gesture and conversational speech interaction, to the automotive domain as well. This integration might on one hand reduce driver distraction in certain cases and on the other hand might allow the design of new user experiences for infotainment and entertainment systems. The goal of this workshop is to explore the design space of natural multi-modal automotive user interfaces and to continue the fruitful discussions held at the 1st Workshop on Automotive Natural User Interfaces from AutomotiveUI ’11 in Salzburg, Austria. We would like to analyze where and how new interaction techniques can be integrated into the car.
Published in EHU Scientific Production Portal, EHU 2012
This thesis presents the design and development of the Conversational Automotive Assistant, Voice User Help, a conversational system based on the question-answer paradigm and designed to consult vehicle documentation while driving. This work compiles research in the fields of technical documentation, information retrieval, natural language processing, vehicle user interface design, user experience, and affective computing with the goal of creating an adaptive and dynamic assistant that modifies its conversational behavior depending on the user’s emotional state.
Published in ‘Adjunct Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 2012)’, 2012
Automotive Natural User Interfaces have the potential to increase user experience providing intuitive interactions for drivers. However, in the complex setting of a driving vehicle, failed interactions with in-vehicle technology can lead to frustration and put drivers in a dangerous situation. This paper evaluates the possibility of applying emotion recognition to vehicular spoken dialogue systems in order to adapt the dialog strategies, in error recovery scenarios. An emotional taxonomy is developed for the interactions with a conversational vehicular application, the Voice User Help. The positive results of the performance of VUH emotion recognizer support the creation of real-time classification of the user emotional state, which serves as basis to emotional reappraisal dialog strategies that mitigate negative effects on the driver’s cognitive load and driver performance.
Published in Journal of Ergonomics, Taylor & Francis Online 2012
The use of brain computer interface (BCI) devices in research and applications has exploded in recent years. Applications such as lie detectors that use functional magnetic resonance imaging (fMRI) to video games controlled using electroencephalography (EEG) are currently in use. These developments, coupled with the emergence of inexpensive commercial BCI headsets, such as the Emotiv EPOC ( http://emotiv.com/index.php) and the Neurosky MindWave, have also highlighted the need of performing basic ergonomics research since such devices have usability issues, such as comfort during prolonged use, and reduced performance for individuals with common physical attributes, such as long or coarse hair. This paper examines the feasibility of using consumer BCIs in scientific research. In particular, we compare user comfort, experiment preparation time, signal reliability and ease of use in light of individual differences among subjects for two commercially available hardware devices, the Emotiv EPOC and the Neurosky MindWave. Based on these results, we suggest some basic considerations for selecting a commercial BCI for research and experimentation.
Statement of Relevance: Despite increased usage, few studies have examined the usability of commercial BCI hardware. This study assesses usability and experimentation factors of two commercial BCI models, for the purpose of creating basic guidelines for increased usability. Finding that more sensors can be less comfortable and accurate than devices with fewer sensors.
Published in Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Springer 2012
The rapid advancement of vehicular technologies has resulted in an exponential increase of new vehicle functions road assistance and connected vehicles services. Vehicle manuals are designed to provide support and information about the use and maintenance of these features. However, current vehicle user manuals do not allow looking for information under driving conditions. This paper presents the Voice User Help, a smart voice-operated system that utilizes natural language understanding and emotional adaptive interfaces to assist drivers when looking for vehicle information with minimal effect on their driving performance. Additionally, the system presents an opportunity for elder drivers to reduce the learning curve of new in-vehicle technologies and improve efficiency. Results on user acceptance of the Voice User Help, as well as cognitive load and driver distraction effects generated during a simulated drive indicate that the Voice User help is an extremely desirable feature and potentially safe application since it did not significantly decrement driving performance. Furthermore preliminary results on adaptive voice interfaces using emotion recognition indicate that personalization of the interaction will be able to palliate possible negative effects that happen during system error recovery.
Published in Jouarnal or Ergonomics, Taylor & Francis 2012
Abstract not available
Not available
Published in ‘Proceedings of AutomotiveUI 2014’, 2014
A major challenge in the future of traffic is to understand how “socially-aware vehicles” could be making use of their social habitus, formed by any information that can be inferred from past and present social relations, social interactions, and a driver’s social state when exposed to other participants in real, live traffic. The aim of this workshop in recognition of this challenge is to advance on a common understanding of the symbiosis between drivers, cars, and the infrastructure. The central objective of the workshop is to provoke an active debate on the adequacy of the concept of social, natural, and peripheral interaction, addressing questions such as “who can communicate what”, “when”, “how”, and “why”? To tackle these questions, we would like to collect different, radical, innovative, versatile, and engaging works that challenge or re-imagine human interactions in the near future automobile space.
Published in ‘Pervasive and Mobile Computing’, 2014
Research on next generation automotive ICT is challenged by the complex interactions of technological advancements and the social nature of individuals using and adopting technology. Traffic in the future will no longer be considered as a network of individually behaving “dumb” cars, but rather as the entirety of social interactions between its entities. Successful application of collective, socially inspired driving mechanisms requires to understand how socially-inspired vehicles (i.e., driver-car pairs) could make use of their social habitus, composed from (past and present) driving behavior, social interactions with pedestrians, vehicles, infrastructure, etc., and drivers’ vital states when exposed to other road participants in live traffic. In response to this emerging research direction, the aim of this workshop is to achieve a common understanding of the symbiosis between drivers, cars, and infrastructure from a global point of view (referred to as “collective driving”). In particular, this workshop is expected to provoke an active debate on the adequacy of the concept of socializing cars, addressing questions such as who can communicate what, when, how, and why?
Published in ‘International journal of human-computer studies’, Elsevier 2015
The growing advancements of in-vehicle electronics and the intrusion of consumer electronics in the vehicle cockpit have increased the complexity of in-car experiences. Therefore, vehicle manuals are needed, now more than ever, to provide information and guidance. Automakers have extended user assistance through multimedia, integrated manuals, online services and telephonic assistance. However, no driver-centric interfaces have been created to provide vehicle documentation assistance effectively. Drivers are expected to interrupt the driving experience in order to find vehicle information in a paper manual. This paper compares the effects on driving performance and cognitive load when consulting a manual in a simulated driving environment through various conditions. These conditions consist of interacting with a voice activated vehicle manual called the Voice User Help, an on-board multimedia manual, a passenger, and a call center. Results suggest that any kind of interaction to access information while driving has an impact on the driver׳s attention based on a decrease in driving performance and increase of cognitive load. However, amongst all modalities, voice interfaces seem to be the better option for consulting information while driving. Also, and under some circumstances, interaction with a conversational manual system appears to be safer than human-to-human communication.
Published in ‘Extended Proceedings of the 7th International Conference on Automotive User’, 2015
This paper outlines and evaluates experiential prototyping for emerging vehicle UX design within a pedagogical framework. Drawing from studio experience, we discuss the learnings, options and risks that in-vehicle UX designers face in prototyping realtime, adaptive user interfaces, and suggest methods and solutions for designers wishing to expand their creative practice.
Published in ‘Adjunct Proceedings AutomotiveUI ’15’, ACM 2015
As driving is mainly a visual task, auditory displays play a critical role for in-vehicle interactions. To improve invehicle auditory interactions to the advanced level, auditory display researchers and automotive user interface researchers came together to discuss this timely topic at an in-vehicle auditory interactions workshop at the International Conference on Auditory Display (ICAD). The present paper reports discussion outcomes from the workshop for more discussions at the AutoUI conference.
Published in ‘AutomotiveUI 2015’, 2015
The search term “driver-vehicle interaction study” results in 2,690 Google Scholar hits of research papers published in the past 5 years (2010-2015). This huge number clearly points out the problem that researchers (particularly, new to this field) are exposed to, namely that many decisions regarding the setting, (e.g., lab/field, low-/high-fidelity simulator, within/between subjects, sample size, biased subject, learning effect, sensor technology, mobile hardware, synchronization issues, briefing, etc.) have to be established early in the design phase without the reference of principled guidelines and best practices to support the min identifying the optimal solution to answer their research question of interest. This workshop invites a) people activein the field to share their experiences in executing studies to measure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draft research questions, present their problems, and discuss possible solutions with the other participants.
Published in Proceedings of Automotive UI 2015, ACM 2015
A major challenge in today’s as well as future driving is to keep drivers informed about the vehicle’s state and the environment. Today’s assistant and infotainment systems compete for the drivers’ attention and may even distract them from the primary driving task. Further, with an increase in automation, the vehicle needs to be able to communicate information with different urgency levels. While some information are not important and should never distract a driver from important tasks, there are also calls for action, which a driver should not be able to ignore. We believe in adaptive ambient displays and peripheral interaction as one possible way to unobtrusively present information while being able to switch the driver’s attention if needed. In this workshop the focus lies in exchange of best known methods and discussion on challenges and potentials for this kind of interaction in today’s scenarios as well as in future mixed or full autonomous traffic. The central objective of this workshop is to bring together researchers from different domains and discuss radical, innovative, and engaging ideas and a future landscape for research in this area.
Published in Proceedings of Automotive UI 2015, ACM 2015
The search term “driver-vehicle interaction study” results in2,690 Google Scholar hits of research papers published inthe past 5 years (2010-2015). This huge number clearlypoints out the problem that researchers (particularly, new tothis field) are exposed to, namely that many decisionsregarding the setting, (e.g., lab/field, low-/high-fidelitysimulator, within/between subjects, sample size, biasedsubject, learning effect, sensor technology, mobilehardware, synchronization issues, briefing, etc.) have to beestablished early in the design phase without the referenceof principled guidelines and best practices to support themin identifying the optimal solution to answer their researchquestion of interest. This workshop invites a) people activein the field to share their experiences in executing studies tomeasure driver behavior or vehicle conditions (driver-vehicle interactions), and b) young researchers to draftresearch questions, present their problems, and discusspossible solutions with the other participants.
Published in * Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications*, ACM 2016
On July 1st 2016, the first automated vehicle fatality became headline news [9] and caused a nationwide wave of concern. Now we have at least one situation in which a controlled automated vehicle system failed to detect a life threatening situation. The question still remains: How can an autonomous system make ethical decisions that involve human lives? Control negotiation strategies require prior encoding of ethical conventions into decision making algorithms, which is not at all an easy task – especially considering that actually coming up with ethically sound decision strategies in the first place is often very difficult, even for human agents. This workshop seeks to provide a forum for experts across different backgrounds to voice and formalize the ethical aspects of automotive user interfaces in the context of automated driving. The goal is to derive working principles that will guide shared decision-making between human drivers and their automated vehicles.
Published in Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2016
This workshop will focus on the problem of occupant and vehicle situational awareness with respect to automated vehicles when the driver must take over control. It will explore the future of fully automated and mixed traffic situations where vehicles are assumed to be operating at level 3 or above. In this case, all critical driving functions will be handled by the vehicle with the possibility of transitions between manual and automated driving modes at any time. This creates a driver environment where, unlike manual driving, there is no direct intrinsic motivation for the driver to be aware of the traffic situation at all times. Therefore, it is highly likely that when such a transition occurs, the driver will not be able to transition either safely or within an appropriate period of time. This workshop will address this challenge by inviting experts and practitioners from the automotive and related domains to explore concepts and solutions to increase, maintain and transfer situational awareness in semi-automated vehicles.
Published in Dagstuhl Reports, Dagtsuhl 2016
The next big change in the automotive domain will be the move towards automated and semi-automated driving. We can expect an increasing level of autonomous driving in the coming years, resulting in new opportunities for the car as an infotainment platform when standard driving tasks will be automated. This change also comes with a number of challenges to automotive user interfaces. Core challenges for the assistance system and the user interface will be distributing tasks between the assistance system and the driver, the re-engagement of drivers in semi-automated driving back to the driving task, and collaborative driving in which cars collectively work together (e.g., platoons). Overall, in the coming years we will need to design interfaces and applications that make driving safe while enabling communication, work, and play in human-operated vehicles. This Dagstuhl seminar brought together researchers from human computer interaction, cognitive psychology, human factors psychology and also from automotive industry and OEMs to discuss the new interface paradigms for (semi-)automated driving.
Published in ‘Adjunct Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’16)’, ACM 2016
Automotive user experiences can be increasingly personalized and adaptive thanks to advances in in-vehicle sensors and user modelling but current automotive software development frameworks still require large software development efforts to create custom interaction solutions. In this paper we propose a novel system architecture aimed at supporting automotive researchers and designers by simplifying the prototyping process towards novel adaptive user interfaces. We describe the integration of RealSense sensors and the Context Sensing SDK with the Skyline driving simulator framework. The combination of these tools allows rapid prototyping of in-cabin context aware interactions. The paper presents two use cases of in-cabin-aware prototypes, a user profile loading interface that recognizes identities and occupant roles and an L4 to L3 take-over control interface using RealSense and Context sensing APIs to detect in-vehicle events and Skyline to present real-time adaptive warning interfaces. The resulting experiences are core components of an intelligent ADAS framework for research of IVI personalization and highly automated collaborative driving.
Published in ‘Proceeding of Automotive UI 2017’, ACM 2017
Abstract not yet available.
Published in ‘Automotive user interfaces: creating interactive experiences in the car’, 2017
Given the rapid advancement of technologies in the automotive domain, driver–vehicle interaction has recently become more and more complicated. The amount of research applied to the vehicle cockpit is increasing, with the advent of (highly) automated driving, as the range of interaction that is possible in a driving vehicle expands. However, as opportunities increase, so does the number of challenges that automotive user experience designers and researchers will face. This chapter focuses on the instrumentation of sensing and displaying techniques and technologies to make better user experience while driving. In the driver–vehicle interaction loop, the vehicle can sense driver states, analyze, estimate, and model the data, and then display it through the appropriate channels for intervention purposes. To improve the interaction, a huge number of new/affordable sensing (EEG, fNIRS, IR imaging) and feedback (head-up displays, auditory feedback, tactile arrays, etc.) techniques have been introduced. However, little research has attempted to investigate this area in a systematic way. This chapter provides an overview of recent advances of input and output modalities to be used for timely, appropriate driver–vehicle interaction. After outlining relevant background, we provide information on the best-known practices for input and output modalities based on the exchange results from the workshop on practical experiences for measuring and modeling drivers and driver–vehicle interactions at AutomotiveUI 2015. This chapter can help answer research questions on how to instrument a driving simulator or realistic study to gather data and how to place interaction outputs to enable appropriate driver interactions.
Published in ‘International Journal of Mobile Human Computer Interaction (IJMHCI)’, 2017
This paper describes the research and development process of an in-vehicle user experience using Skyline, an automotive prototyping platform created in Intel Labs to empower interaction designers and user experience researches to rapidly and iteratively develop and test in-vehicle user experience concepts. The paper describes the hardware and software components of Skyline in depth and how to configure them to suit individual researcher needs. The paper also presents a case study to exemplify the design making process that Skyline enables. From ideation to use-case creation, prototyping and validation through user assessment, the paper showcases the benefits of capturing early qualitative user feedback as support for rapid prototyping walking through a study titled Agency vs. Control and the associated interactions inside the cockpit. Ten defined use-cases are developed and integrated into a hero scenario in Skyline. High fidelity HMI concepts are tested and validated over the course of six months with feedback from a total of fifty users.
Published in ‘Springer Nature Advances in Human Aspects of Transportation’, Springer 2017
Advancements of in-vehicle technologies and the development of mobile applications that keep a driver connected in a driving environment have caused an increasingly dangerous safety concern. Distracted driving has gained the attention of legislators and governments globally. Countries have constituted bans that partially or fully forbid drivers from using gadgets while driving, especially hindering out-of-the-vehicle communications. This paper introduces Voiceing™, a voice-activated application meant to improve social communications in the car, serving as a safe alternative to distracted driving. Other modalities of interaction such as texting, in-vehicle conversations and outside-of-the-vehicle conversation have been measured and compared with Voiceing™ investigating effects on driver’s performance, cognitive load and user acceptance. Results from this study suggest that Voiceing™ is a safer alternative than in-vehicle interactions with humans. Results also show that natural speech interaction of in-vehicle applications and the inclusion of context awareness help improve driving performance while interacting with a vehicle system.
Published in Automotive User Interfaces: Creating Interactive Experiences in the Car, Springer Book, Springer 2017
In-vehicle experiences are made up mainly of mundane small moments, repeated practices, and taken-for-granted decisions that make up daily experiences in and around private passenger vehicles. Understanding what those experiences are for drivers around the world presents an opportunity for designing novel interactive experiences, technologies, and user interfaces for vehicles. In this chapter, we present a set of tools, methodologies, and practices that will help reader create a holistic design space for future mobility. Transitioning between ethnography, insights, prototyping, experience design, and requirements decomposition is a challenging task even for experienced UX professionals. This chapter provides guidance in this matter with practical examples.
Published in ‘Automotive User Interfaces: Creating Interactive Experiences in the Car’, ACM 2017
Informing a driver of a vehicle’s changing state and environment is a major challenge that grows with the introduction of in-vehicle assistant and infotainment systems. Even in the age of automation, the human will need to be in the loop for monitoring, taking over control, or making decisions. In these cases, poorly designed systems could lead to needless attentional demands imparted on the driver, taking it away from the primary driving task. Existing systems are offering simple and often unspecific alerts, leaving the human with the demanding task of identifying, localizing, and understanding the problem. Ideally, such systems should communicate information in a way that conveys its relevance and urgency. Specifically, information useful to promote driver safety should be conveyed as effective calls for action, while information not pertaining to safety (therefore less important) should be conveyed in ways that do not jeopardize driver attention. Adaptive ambient displays and peripheral interactions have the potential to provide superior solutions and could serve to unobtrusively present information, to shift the driver’s attention according to changing task demands, or enable a driver to react without losing the focus on the primary task. In order to build a common understanding across researchers and practitioners from different fields, we held a Workshop on Adaptive Ambient In-Vehicle Displays and Interactions at the AutomotiveUI`15 conference. In this chapter, we discuss the outcomes of this workshop, provide examples of possible applications now or in the future and conclude with challenges in developing or using adaptive ambient interactions.
Published in Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, ACM 2017
Automated driving systems (ADS) are mainly regarded from an innovation and technology-centered perspective. In academia, as well as in industry, there is a concentration on technical issues to maintain competitiveness while aspects like acceptance, trust and user experience are widely under-researched. However, the “human factor” is critical for a comprehensive establishment of ADS technology on the market. We believe that there is a need to focus on a user-centered design (UCD) perspective to bring ADS innovation to a next level and to achieve a wide acceptance in society. In this workshop we want to discuss special requirements of UCD applied to ADS, to address challenges and opportunities and to reveal new research fields for future work.
Published in ‘Springer Natural Digital Human Modelling’, Springer 2018
As development of automated vehicles and adoption of electric vehicles continue to grow, there is an increasing interest in the public opinions on these technologies. We conducted an international online survey to gather information about people’s hopes and concerns for automated and electric vehicles from a total of 866 people from four countries – Austria, Germany, South Korea, and USA. Results revealed some differences across countries in the perceptions of automated and electric vehicles. However, differences between the same countries have shrunk compared to our previous survey completed in 2012. Results are discussed with limitations and future work.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18)’, ACM 2018
Augmented reality (AR) has the potential to improve road safety, support more immersive (non-) driving related activities, and finally enhance driving experience. AR may also be the enabling technology to help on the transition towards automated driving. However, augmented reality still faces a number of technical challenges when applied in vehicles, and also several human factors issues need to be solved. In this workshop, we will discuss potential and constraints as well as impact, role, and adequacy of AR in driving applications. The primary goal of this workshop is to define a research agenda for the use of AR in intelligent vehicles within the next 3 to 5 years.
Published in ‘Automotive UI 2018’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2018
Abstract not yet available.
Published in ‘Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications AutomotiveUI 2018’, ACM 2018
In-car emotion detection and regulation have become an emerging and important branch of research within the automotive domain. Different emotional states can greatly influence human driving performance and user experience both in manual and automated driving conditions. The monitoring and regulation of relevant emotional states is therefore important to avoid critical driving scenarios with the human driver being in charge, and to ensure comfort and acceptance in autonomous driving. In this workshop we want to discuss the empathic user interface research to address challenges and opportunities and to reveal new research directions for future work. This workshop provides a forum for exchange and discussion on empathic user interfaces, including methods for emotion recognition and regulation, empathic automotive human-machine interaction design, user evaluation and measurements, and subsequent improvement of autonomous driving experience.
Published in Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), IEEE 2018
Current automated driving systems assume drivers continuously monitor the vehicle. Meanwhile, fully automated vehicles aim at not requiring human intervention for their safely operation. The industry is currently debating how these novel systems can be certified under functional safety standards. In this paper, we argue that the current safety picture is not comprehensive enough, since it alienates users. We propose experiential safety as a complement to existing functional safety and to develop a framework for experiential safety interactions between the user and automation in automated driving environments. To support the experiential safety design model, we provide an overview of the user-centered research on experiential automation safety, which includes results from online surveys, personal interviews, and gamified group workshops. We explore current user behaviors by focusing on what makes them feel safe as drivers and passengers, and how unexpected events and automation responses might impact their perception of safety. Among the highlighted results, we show how mismatched expectations and unexpected behaviors from autonomous vehicles can lead to frustration and compromised trust. We also show how automation feedback to the user can generate stress and anxiety if not properly configured and how a cooperative relationship between automation and the driver leads to more satisfying driving experiences. Finally, we present guidelines for the experiential safety to be applied by automotive engineers and designers in their development of automated driving technologies.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
We foresee conversational driver assistants playing a crucial role in automated driving interactions. In this video we present a study of user interactions with an in-vehicle agent, “Theo”, under SAE Level 4 automated driving. We use a remote Wizard-of-Oz setup where participants, sitting in a driving simulator, experience real-life video footage transmitted from a vehicle in the neighborhood and interact with Theo to instruct the vehicle where to go. We configured Theo to present 3 levels of conversational abilities (terse, verbose and helpful). We show the results of 9 participants tasked to negotiate destinations and route changes. Voice interaction was reported as preferred means of communication with Theo. There was a clear preference for talkative assistants which were perceived more responsive and intelligent. We highlight challenging interactions for users such as vehicle maneuvers in parking areas and specifying drop off points and interesting associations between the agent performance and the automated vehicle abilities.
Published in Proceedings of the 13th IEEE International Conference on Automatic Face & Gesture Recognition, IEEE 2018
Automated driving has the potential to reduce the amount of fatal crashes, lighten the burden of commutes, and democratize mobility access to wider populations. But delegation of control to automation is not without issues. One of the foreseen drawbacks is that users might experience negative emotional reactions to unanticipated or unexplainable automated maneuvers. In this paper we present a novel method to induce targeted emotional reactions, frustration and startle, in simulated automated driving environments. We describe the data collection process for 17 driver - passenger dyads and discuss the data labelling method for generating reliable novel emotion datasets. This contribution is a foundational methodology towards expanding emotional understanding in automated vehicles, a critical skill for building long-term trusted experiences.
Published in Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), ACM 2018
Automated driving systems (ADS), especially in higher levels of automation, seem to be the new focus of innovation regarding future mobility. Technological achievements of traveling automation open up new challenges for road traffic. Existing automotive research focuses on problem solving and observational approaches including users and their imagination of the future of mobility to analyze acceptance and user experience of “incremental” (step-wised improved) innovations. On the other hand, “radical” (something new, enabled by technology or meaning change) innovations extensively increase product quality leaping over incremental innovation. This workshop aims to challenge the current research approaches to automated driving against “trying to improve sitting in a horse carriage” and discuss how we can design “radical” innovations for ADS beyond the “horse carriage”. Within this interactive workshop, we will utilize a design thinking approach to refocus on underlying problems that ADSs originally aim to solve and generate ideas for radical innovations.
Published in Proceedings of the 2019 International Conference on Intelligent Transportation Systems (ITSC), IEEE 2019
The scientific knowledge and tools for the mass deployment of Automated Vehicles (AVs) are maturing rapidly, as evidenced by the wide deployment of AV test fleets worldwide. These vehicles have the potential to produce tremendous economic and societal benefits including greatly reduced traffic accidents, injuries, and congestion, and to make less expensive, more flexible and more productive transportation available to all. But one challenge looms above all others in the race to full vehicle automation; solving the AV Safety Assurance challenge. Automated transportation is not just a product, but an industry. And it is as an industry that we must together solve this challenge. We invite researchers, automakers, technology companies, and government regulators to come together to develop a holistic model to define and measure AV Safety. In this special session we present papers that provide contributions to the definition, applicability and standardization of AV safety assurance, including methods for the development of metrics, benchmarks and evangelisation of AV Safety Assurances to users and the public. This session continues the open discussion started in 2018 ITSC with the goal of making AV Safety a reality. The session will consist of high quality paper presentations as well as a panel discussion with some of the most relevant figures of the AV industry.
Published in ‘IEEE Intelligent Transportation Systems Conference’, IEEE 2019
The recent trend of integrating vehicular communications with advanced sensors installed on vehicles, enables Connected and Autonomous Vehicles (CAVs) to share their own driving information as well as perception information, such as a list of perceived objects (e.g., dynamic obstacles such as vehicles, pedestrians, and cyclists, and static obstacles). This has the potential to improve driving safety by expanding collective perception of vehicles. However, adversaries may also populate false information to other Connected Vehicles (CVs) via Vehicle-to-Vehicle (V2V) communications. This paper investigates the security aspects of mixed deployment of CAVs, CVs and legacy vehicles, and in particular with regards to misbehavior detection. We provide a generic design framework that is independent from the specific algorithms of the underlying perception system, and can be used to implement a practical Misbehavior Detection System (MDS). We analyze the MDS framework w.r.t. a ghost vehicle attack. While no computing system can be completely secure, we believe this work would help the industry to develop a practical MDS design within a common framework while allowing individual techniques to mature and evolve over time with future academic research.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in ‘International Journal of Human Computer Interaction’, Elsevier 2019
To draw a comprehensive and cohesive understanding of human–vehicle cooperation in automated driving, a review is made on key studies in human–robot interaction and human factors. Throughout this article, insight is provided into how human drivers and vehicle systems interplay and influence each other. The limitations of technology-centered taxonomies of automation are discussed and the benefits of accounting for human agents are examined. The contributions of machine learning to automated driving and how critical models in human-system cooperation can inform the design of a more symbiotic relationship between driver and vehicle are investigated. Challenges in the human element to enable the safe introduction of road automation are also discussed. Particularly, the unintended consequences of vehicle automation on driver’s workload, situation awareness and trust are examined, and the social interactions between driver, vehicle, and other road users are investigated. This review will help professionals shape future directions for safer and more efficient and effective human–vehicle cooperation.
Published in Proceedings of 2019 IEEE Intelligent Transportation Systems Conference (ITSC), IEEE 2023
Advances in vehicular communication technologies have made Connected Vehicles (CVs) a near-term reality. Compared to models where vehicles rely solely on their own perception to sense and make decision on the environment, CVs have the potential to allow information sharing among vehicles to improve sensing and decision making collectively. A first concrete step towards this goal is enabling vehicles to share perception-related information, to overcome limitations of their respective sensors (e.g., partial awareness due to occlusions). Sharing processed information vs raw sensor data has the advantage of reducing the amount of data to be transmitted, and the required computation burden at the receiver side.This paper proposes an approach to enable object-level sharing among vehicles. Following state-of-the-art object-level management techniques, we developed a two-layer architecture that handles object tracking and fusion from dynamic remote sources of information. We implemented our approach and showed that it can achieve realistic performance, and robustness both in terms of quality of information and computation.
Published in ‘Proceedings of the IEEE International Conference in Intelligent Transportations Systems 2019’, IEEE 2019
To study naturalistic in-cabin emotion we developed SKYNIVI, a modified open source driving simulator, with scenarios designed to elicit startle and frustration. We target generating these emotions because we believe that by detecting these it will be possible for autonomous vehicles to learn to drive better. We show how to use SKYNIVI to develop datasets that capture naturalistic emotions in drivers and passengers for algorithmic development. We recruited 51 participants as dyads and single drivers to participate in two different scenarios. We show that we were able to evoke hundreds of instances of our target emotions in this cohort and present an analysis of factors we found to impact emotional expression including: scenario design , demographic factors, personality and baseline affect . We find that having a second person in the vehicle impacts observed expressions of emotion even when no difference in baseline affect is reported.
Published in ‘Proceedings of the IEEE Intelligent Vehicle Symposium 2019’, IEEE 2019
The need for safety in Automated Driving (AD) is becoming increasingly critical with the accelerating deployment of this technology. Beyond functional safety, industry must guarantee the operational safety of automated vehicles. Towards that end, Mobileye introduced the Responsibility Sensitive Safety (RSS), a model-based approach to Safety [1]. In this paper we expand upon this work introducing the C++ Library for Responsibility Sensitive Safety, an open source executable that implements a subset of RSS. We provide architectural details to integrate the C++ Library for Responsibility Sensitive Safety with AD Software pipelines as safety module overseeing decision making of driving policies. We illustrate this application with an example integration with the Baidu Apollo AD stack and simulator, [2] and [3], that provides safety validation of the planning module. Furthermore, we show how the C++ Library for Responsibility Sensitive Safety can be used to explore the usefulness of the RSS model through parameter exploration and analysis on minimum safe longitudinal distance, (dmin), considering different weather conditions. We also compare these results with half-of-speed rule followed in some parts of the world. We expect that the C++ Library for Responsibility Sensitive Safety becomes a critical component of future tools for formal verification, testing and validation of AD safety and that it helps bootstrap the AD research efforts towards standardization of safety.
Published in ‘Transportation research interdisciplinary perspectives’, 2020
This paper provides a framework for examining human-vehicle interactions with respect to three dimensions that can involve models or simulations: the agents, the environments, and the scenarios. Agents are considered on a spectrum from human to artificial actors. Environments are considered on a spectrum from simulated to real. Scenarios are considered on a spectrum from constrained to unconstrained. It is argued that these three dimensions capture key differences in research approaches within the field of human-vehicle interaction, and that explicitly situating research and discussions within this framework will allow researchers to better compare and contrast research outcomes and contributions. The framework is used to locate different disciplines in the community with respect to one another, and to identify areas which are as-yet unexplored.
Published in ACM IX Interaction Journal, 2020
ACM SIGCHI Auto-UI is a growing community, but one in which some continents were less involved than expected and hoped for. For the 2019 conference in Utrecht, the Netherlands, we made various targeted attempts to grow and diversify our international community, with support from the ACM SIGCHI Development Fund. Our efforts resulted in a growth in the number of Asian participants, which made up almost 20 percent of the attendees. In this blog, we briefly reflect on our initiatives and on a panel discussion focusing on research topics that matter more globally to the Auto-UI field.
Published in ‘Proceedings of 12th International Conference in Automotive User Interfaces and Interactive Vehicular Applications’, 2020
Driver performance and behavior can be partially predicated based on one’s emotional state. Through ascertaining the emotional state of passengers and employing various mitigation strategies, empathic cars can show potential in improving user experience and driving performance. Challenges remain in the implementation of such strategies, as individual differences play a large role in mediating the effect of affective intervention. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of targeted emotion intervention methods. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this short workshop, researchers will determine ideal intervention methods for prospective user groups. This will be achieved through the method of insight combination to generate and discuss ideas.
Published in In proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, IEEE 2020.
Safety is an important challenge in the development of automated vehicles (AVs). To help with the challenge of achieving higher safety in the decision making of AVs, Intel and Mobileye have proposed a parameterized model named Responsibility-Sensitive Safety (RSS). Previous studies have demonstrated that RSS has the potential to improve the safety performance of automated vehicles. However, RSS could lead to a considerable car-following distance depending on the parameter values chosen for the model, which could reduce traffic efficiency. To improve the efficiency of RSS applied to Adaptive Cruise Control (ACC) systems, previous work proposed an efficiency-optimal (referred as “Efficiency-optimal RSS”) variation of the RSS model that involves different triggering conditions of a proper response. Therefore, in this paper a human-in-the-loop driving simulation experiment was conducted to evaluate the performance and acceptance of different safety methods. The RSS model and the efficiencyoptimal variant were embedded in an ACC system based on Model Predictive Control (MPC) algorithm. Two car-following scenarios with a sudden deceleration of lead vehicle at various time headways were simulated to evaluate the human perception and response of the different models. Results show that the original RSS model improves subjective safety judgment of human drivers. While the Efficiency-optimal RSS variant has a lower subjective safety score when compared to original RSS, it significantly reduces driver’s emergency braking reactions when compare to an ACC only system.
Published in Proceedings of IEEE Intelligent Vehicle Symposium 2020, IEEE 2020.
The determination of safety assurances for automated driving vehicles is one of the most critical challenges in the industry today. Several behavioral safety models for automated driving have been proposed recently and standards discussions are on the way. In this paper we present a method to automatically explore the performance of automated vehicle (AV) safety models utilizing robustness of Metric Temporal Logic (MTL) specifications as a continuous metric of safety. We present a case study of the Responsibility Sensitive Safety model (RSS), introducing a safety evaluation pipeline based on the CARLA driving simulator, RSS and a set of safety-critical driving scenarios. Our method automatically extracts safety relevant profiles for these scenarios providing practical parametric boundaries for implementation. Furthermore, we evaluate the trade-offs between safety and utility within the safe RSS parameter space through a proposed naturalistic benchmark challenge that we open-sourced. We analyze different RSS parameter configurations including assertive and more conservative settings, extracted by our specification-driven framework. Our results show that while maintaining the safety boundaries, the extracted RSS configuration for assertive driving behavior achieves the highest utility.
Published in ‘Proceedings of 2020 AAAI Conference’, AAAI 2020
Automated driving is an ML-intensive problem and its safety depends on the integrity of perception as well as planning and control. Responsibility Sensitive Safety (RSS) is a recent approach to promote safe planning and control that relies on perfect perception; however, perceptual uncertainty is always present, and this causes the possibility of misperceptions that can lead an autonomous vehicle to allow unsafe actions. In this position paper, we sketch a novel proposal for a formal model of perception coupled with RSS to help mitigate the impact of misperception by using information about perceptual uncertainty. The approach expresses uncertainty as imprecise perceptions that are consumed by RSS and cause it to limit actions to those that support safe behaviour given the perceptual uncertainty. We illustrate our approach using examples and discuss its implications and limitations.
Published in ‘Proceedings of IEEE Intelligent Transportation Systems Conference 2021’, IEEE 2021
Recently, Collective Perception Messages (CPM) that carry additional information about the surrounding environment beyond Basic Safety Messages (BSM) or Cooperative Awareness Messages (CAM) have been proposed to increase the situational awareness for Connected and Automated Vehicles (CAV) in Intelligent Transportation Systems. However, blindly trusting perception information from neighbors that cannot be locally verified is dangerous given the safety impact that erroneous or malicious information might have. This paper addresses the data trust challenge of CPMs, proposing a misbehavior detection scheme called MISO- V (Multiple Independent Sources of Observations over V2X) that leverages the inherently overlapping nature of the perception observations from multiple vehicles to verify the semantic correctness of the V2X data and improve the data trust and robustness of V2X systems. CPM-enabled CAVs are implemented and MISO-V performance is evaluated in CARLA-based simulation tool, where falsified V2X packets presenting a ghost car are injected in a suburban T-junction scenario with other cars. The results show that MISO- V is very effective in detecting the ghost car attacks and removing the impact of such misbehavior from influencing the receiver and offers a conservative and sensible approach towards trustworthy Collective Perception Services for CAVs.
Published in Proceedings of the IEEE Intelligent Vehicles Symposium (IV), IEEE 2021
The need for safety in automated driving is undisputed. Since automated vehicles are expected to reduce the number of fatalities in road traffic significantly, hundreds of millions of test kilometers would be required for statistical safety validation [1]. Physics-based safety verification approaches are promising in order to reduce this validation effort. Towards this goal, Mobileye introduced the concept of Responsibility-Sensitive Safety (RSS). In RSS, bounds for the reasonable worst-case behavior of traffic participants are assumed to be given, such as the reaction time or the maximum deceleration. These parameters have a crucial effect on the applicability of the approach: choosing conservative parameters likely hinders traffic flow, while the opposite could lead to collisions, as the assumptions are violated. Thus, in this work, we focus on finding reasonable parameters of RSS. Based on the physical limits, legal requirements and human driving behavior, we propose scopes and parameter sets that allow for a sound safety verification while not hindering traffic flow. Furthermore, we present an approach that explains seemingly frequent human drivers’ RSS violations on highways and may lead to a useful extension of RSS.
Published in ‘SAE Technical Paper’, SAE 2021
As industry races to complete technical development of automated driving systems (ADS), important questions are being raised about how to measure the safety of such systems and the overall safety of Automated Vehicles (AVs). Traffic safety engineers have for decades utilized metrics to assess the safety of human drivers and measurements such as Time To Collision (TTC) and Time Headway (THW) have proven to be a useful indicator of increased risk of an accident for human drivers. But what if we can do better with AVs? Are human driving derived risk metrics meaningful for a self-driving vehicle? Recently, the Institute for Automated Mobility (IAM) published a set of metrics defined specifically for self-driving vehicles that provide a thorough assessment of the safety of an AV. While humans must use estimation and cautious judgement to make decisions, AVs can use precise measurement techniques via sensors and correlate multiple sources of data in real time. Utilizing information such as the reaction time of the ADS, the braking capability of the AV and more, the IAM proposed metrics allow for the assessment of the safety of an AV to be accurately measured, not as a notion of approximated risk, but as a binary calculation of safety. In this paper we analyze, compare and contrast human driving, risk-oriented safety metrics with the more definitive metrics proposed for AVs. We answer important questions about the necessary evolution of human derived metrics to ensure they are meaningful in the assessment of the safety of an AV, as well as whether novel metrics proposed for AVs can be used to better understand and assess the safety performance of AVs when compared to historical safety measures. Our research proves that AV-based assessment metrics can provide better insight into the safety of both AVs and human drivers.
There is little doubt that driving generates emotional responses, whether that’s the joy of freedom, the boredom of stop-and-go traffic or anger towards unsafe maneuvers. In this chapter we provide an overview of emotion research applied to the automotive context and highlight the impact of emotional states in varying levels of driving automation. We review the most critical research findings on the impact of emotional states in driving performance including reaction time and take-over readiness. We also discuss the application of emotion regulation strategies related to the driving task. Finally, we analyze the research challenges still present for robust emotional classification and personalization in their application to in-vehicle interactions. This technology offers great potential for the development of emotionally-aware in-cabin driver assistants which will play a critical role in the future of automated driving user experience development.
Published in ‘Adjunct Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, ACM 2022
Empathic in-vehicle interfaces can address driver affect and mitigate decreases in driving performance and behavior that are associated with emotional states. Empathic vehicles can detect and employ a variety of intervention modalities to change user affect and improve user experience. Challenges remain in the implementation of such strategies, as a broader established view of practical intervention modalities and strategies is still absent. Therefore, we propose a workshop that aims to bring together researchers and practitioners interested in affective interfaces and in-vehicle technologies as a forum for the development of displays and alternatives suitable to various use case situations in current and future vehicle states. During the workshop, we will focus on a common set of use cases and generate approaches that can suit different user groups. By the end of this workshop, researchers will create a design flowchart for in-vehicle affective display designers when creating displays for an empathic vehicle.
Published in ‘Proceedings of ACM’s Computer Human Interaction Conference (CHI)’, ACM 2022
Empathic vehicles are expected to improve user experience in automated vehicles and to help increase user acceptance of technology. However, little is known about potential real-world implementations and designs using empathic interfaces in vehicles with higher levels of automation. Given advances in affect detection and emotion mitigation, we conducted two workshops (N1 =24, N2 = 22, Ntotal = 46) on the design of empathic vehicles and their potential utility in a variety of applications. This paper recapitulates key opportunities in the design and application of empathetic interfaces in automated vehicles which emerged from the two workshops hosted at the ACM AutoUI conferences.
This standard applies to road vehicles. It defines a minimum set of reasonable assumptions and foreseeable scenarios that shall be considered in the development of safety related models that are part of an automated driving system (ADS). Scope: This standard applies to road vehicles. For a set of scenarios, a minimum set of assumptions regarding reasonably foreseeable behaviors of other road users are defined that shall be considered in the development of safety-related models for automated driving systems (ADS). This standard further defines a list of attributes common to contributed safety-related models and methods to help verify whether a safety-related model takes the minimum set of assumptions into consideration. An informative annex instantiates several examples of how the proposed minimum set of assumptions could be employed in ADS development. Sources of uncertainty, such as prediction or perception errors, are out of scope to this standard. This standard does not guarantee the safety of the overall system in all scenarios. Purpose: Government and Industry alike need an open, transparent, and technology-neutral standard that provides guidance useful for evaluating the performance of an ADS. This guidance consists of a minimum set of assumptions with bounds on reasonably foreseeable behaviors of other road users used in the development of safety-related models.
@ARTICLE{9761121, author={}, journal={IEEE Std 2846-2022}, title={IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems}, year={2022}, volume={}, number={}, pages={1-59}, keywords={IEEE Standards;Autonomous vehicles;Vehicle safety;Autonomous driving;Vehicle driving;Data privacy;Decision making;ADS;ADS-operated vehicle;automated driving system;assumption;automated vehicle;autonomous vehicles;AV;decision-making;IEEE 2846}, doi={10.1109/IEEESTD.2022.9761121}}
Published in Proceedings of the IEEE 2022 Winter Simulation Conference, IEEE 2023
Ensuring the safety of autonomous vehicle (AV) relies on accurate prediction of error occurrences in its perception system. Due to the inter-stage functional dependence, the error occurred at a certain stage may be propagated to the following stage and generate extra errors. To quantify the error propagation, this paper adopts the physics-based simulation, which enables fault injection at different stages of an AV perception system to generate error event data for error propagation modeling. A multi -stage Hawkes process (MSHP) is proposed to predict the error occurrences in each stage, with error propagation represented as a latent triggering mechanism. With explicitly considering the error propagation mechanism, the proposed outperforms benchmark methods in predicting error occurrence in a physics-based simulation of a multistage AV perception system. The proposed two-step likelihood-based algorithm accurately estimates the model coefficients in a numerical simulation case study.
Published in ‘MDPI Sensors’, 2022
Connected and automated driving technologies have the potential to revolutionize transportation by facilitating mobility services to a wider population, improving safety and traffic efficiency. Automated driving technology is expected to reduce the number of accidents caused by human error and avert deadly crashes, ensure mobility for all, including old and impaired individuals, allow the human driver to perform alternative (secondary) tasks, increase traffic flow efficiency, reduce fuel consumption, and lower emissions.
Driven by these goals, humankind is experiencing an exponential growth in vehicle automation taking over the monitoring of surroundings and vehicle control tasks from human drivers in a quest towards full autonomy. Connected and automated vehicles are equipped with multimodal sensors that allow continuous perception and monitoring of driving tasks to assist drivers in lower levels of SAE automation or to fully take control of driving tasks under full SAE automation. Numerous sensors, both inside and outside vehicles, allow the detection and identification of oncoming obstacles, the determination of their velocity, and the prediction of future behaviours to avoid potential collisions. Each sensor has its own strengths and weaknesses in terms of range, accuracy, energy consumption. and sensitivity towards external conditions such as weather and light. Automated vehicles usually rely on a mix of signals to improve operational reliability and robustness under the dynamic external conditions of real-world deployments. Generally, we can divide external AV sensors into two major groups: active and passive. Active sensors generate an active signal (electromagnetic or light) transmitted to the external environment to analyse its reflection (e.g., radar, lidar), whereas passive sensors just record the information from the environment (e.g., camera). Additionally, there have been advances in intelligent transportation infrastructure to monitor road users, perform predictive analytics, and facilitate collaborative perception services and remote vehicle control.
The increasing commercial availability of conditional automation (SAE level 3) and the incoming Robotaxi services (SAE Level 4) have also resulted in an increase in in-cabin monitoring sensors dedicated to monitoring driver and passenger behaviours. Multimodal in-cabin monitoring systems are crucial enablers for successfully managing automated vehicle operations. These systems enable the detection of the driver/passenger’s physiological state and activity to assess their readiness to take over control of the vehicle if required as well as to monitor their safety. Driving monitoring solutions provide information on occupants’ fatigue, distraction, discomfort, and stress. Furthermore, they can help to verify that automation is used properly by evaluating engagement in the driving monitoring task or the inherent risk of the non-driving tasks.
This Special issue aims to collect original theoretical or empirical articles on different sensing technologies, solutions, and applications for automated vehicles.
Published in Journal Name, 2023
This book is dedicated to user experience design for automated driving to address humane aspects of automated driving, e.g., workload, safety, trust, ethics, and acceptance. Automated driving has experienced a major development boost in recent years. However, most of the research and implementation has been technology-driven, rather than human-centered. The levels of automated driving have been poorly defined and inconsistently used. A variety of application scenarios and restrictions has been ambiguous. Also, it deals with human factors, design practices and methods, as well as applications, such as multimodal infotainment, virtual reality, augmented reality, and interactions in and outside users. This book aims at 1) providing engineers, designers, and practitioners with a broad overview of the state-of-the-art user experience research in automated driving to speed-up the implementation of automated vehicles and 2) helping researchers and students benefit from various perspectives and approaches to generate new research ideas and conduct more integrated research.
Published in IEEE Standards, 2022
This document presents a review of relevant literature (e.g., standards, regulations, and scientific publications) that investigated kinematic behavior of road users. This review is intended to serve as a key contribution to the Automated Driving Systems (ADS) research and industry communities, as well as to current standardization efforts, such as IEEE Std 2846, IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems.
Published in ‘2023 IEEE 26th International Conference on Intelligent Transportation Systems’, IEEE 2023
Areas of limited visibility are common in day-to-day traffic: be it static buildings, parked vehicles, traffic participants blocking the vehicle’s line of sight, harsh weather conditions or just narrow curves that impede the automated driving sensor suite to inspect the road ahead. Autonomous vehicles have to be able to safely cope with this kind of constraints. The Responsibility-Sensitive Safety model (RSS) demands vehicles to exercise caution with respect to occlusions and to consider also occluded road agents. This paper provides a concrete implementation of how occlusions in RSS can be addressed and investigates the balance between safety and usefulness of the model when a reasonably foreseeable behavior of occluded road agents is assumed. We perform occlusion experiments in urban as well as on highway scenarios with the driving simulation platform CARLA applying different parameterization of the agents kinematic properties and the safety model parameters to analyse and judge the consequences with respect to safe driving and overcautious driving behaviors.
Published in ‘Proceedings of ACM’s Automotive UI 2023’, ACM 2023
This workshop aims to design advanced empathic user interfaces for in-vehicle displays, particularly for high-level automated vehicles (SAE level 3 or higher). Incorporating model-based approaches for understanding human emotion regulation, it seeks to enhance the user-vehicle interaction. A unique aspect of this workshop is the integration of generative artificial intelligence (AI) tools in the design process. The workshop will explore generative AI’s potential in crafting contextual responses and its impact on user experience and interface design. The agenda includes brainstorming on various driving scenarios, developing emotion-oriented intervention methods, and rapid prototyping with AI tools. The anticipated outcome includes practical prototypes of affective user interfaces and insights on the role of AI in designing human-machine interactions. Through this workshop, we hope to contribute to making automated driving more accessible and enjoyable.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Empathic in-vehicle interfaces are critical in improving user safety and experiences. There has been much research on how to estimate drivers’ affective states, whereas little research has investigated intervention methods that mitigate potential impacts from the driver’s affective states on their driving performance and user experiences. To enhance the development of in-vehicle interfaces considering emotional aspects, we have organized a workshop series to gather automotive user interface experts to discuss this topic at the International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutoUI). The present paper focuses particularly on the intervention methods created by the experts and proposes design recommendations for future empathic in-vehicle interfaces. We hope this work can spark lively discussions on the importance of drivers’ affective states in their user experience of automated vehicles and pose the right direction.
Published in ‘Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2023
Safety Assurance remains a challenge for the large-scale deployment of Automated Driving Systems (ADS). Safety models monitor the performance of the ADS. Most safety models are validated both in simulation and during on-road tests. However, first-hand experiences and analysis of ADS safety models are not easily accessible to the general research community. This paper introduces the RSS driving demonstrator an open-source simulation tool that enables first-hand experience of the Responsibility Sensitive Safety (RSS) safety model proposed by Intel and Mobileye and adopted by several Automotive Industry standards and regulatory frameworks. The RSS demonstrator enables first-hand interactions and experience of ADS safety model restrictions in both automated and manual driving conditions. As a User Experience (UX) tool, it provides quantitative safety metrics and flexible user interaction features. The results indicate it served to both evangelize the RSS ADS safety model with laymen population and is a versatile tool for Automotive UX development.
Published in ‘Adjunct Proceedings of the 16th International Conference on Automotive User Interfaces and Interactive Vehicular Applications’, 2024
The rapid advancement of automated vehicles has aroused the curiosity of researchers in the automotive field. Understanding the emotional aspects of this technology is critical to improving human-vehicle interactions. The topics of the proposed workshop will be expanded from internal to external empathetic interface designs of automated vehicles. The workshop will gather researchers and practitioners to brainstorm and design affective internal and external interfaces for automated vehicles, targeting specific use cases within the social context. During the workshop, participants will use an affective design tool and generative AI to prototype affective interface designs in automated vehicles. With this creative approach, we aim to expand the knowledge of affective eHMIs in addition to in-vehicle designs and understand social factors that contribute to the user perceptions of automated vehicles.
Published in ‘Transportation Research Part C: Emerging Technologies’, 2024
Ensuring the reliability of sensor-fusion-based perception systems is crucial for the safe deployment of autonomous vehicles. Such systems function through a sequence of interconnected stages, where errors in upstream stages may propagate to downstream stages and trigger additional errors. The cross-stage error propagation conceptually exists and makes errors in different stages, not independent, posing model challenges, estimation challenges, and data challenges for reliability modeling. The existing methods cannot be applied to address all these challenges. Thus, this paper presents a recursive event-triggering point process to explicitly consider the error propagation based on the simulated data. The data are simulated from a proposed error injection framework, which can generate various errors from a sequence of interconnected stages in a perception system. The latent and probabilistic error propagation information is incorporated into a modified expectation–maximization (EM) algorithm for parameter estimation. The numerical and physics-based simulation case studies demonstrate the prediction accuracy and interpretability of the proposed modeling methodology.
Published in Proceedings fo the Human Factors and Ergonomics Society Annual Meeting, 2025
The rapid development of automated vehicles offers promising avenues to enhance user experience and safety by integrating empathic in-vehicle interfaces. The report from the workshop Emotion GaRage series, held during the AutomotiveUI ’23 conference, investigates the potential of employing generative artificial intelligence (AI) to develop these empathic interfaces. Our workshop emphasized the importance of emotion recognition and regulation for passengers in driving contexts and the role of future in-vehicle empathic interfaces. Through collaborative design sessions, participants developed personalized in-vehicle agents to address drivers’ emotional states to improve safety and enjoyment. We explored insights by investigating the potential and possibilities of using generative AI in the design process. This report discusses the significance of empathic displays in facilitating the adoption of automated vehicles and explores the potential and limitations of using generative AI in the design phases.
Published in Adjunct Proceedings of the 17th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2025
This paper investigates how in-car conversational agents can support parents driving with young children—a group prone to distraction and cognitive overload. In a high-stress driving simulator study, 22 participants experienced a navigation assistant using four modalities: visual, verbal, non-verbal auditory, and haptic. Feedback was collected using a modified NASA TLX (DALI) and interviews. Verbal navigation instructions were rated most effective, reducing stress and distraction, while haptic feedback was seen as a useful secondary channel for urgent cues. Non-verbal auditory signals were largely ineffective in noisy environments. Participants favored multimodal combinations that balanced clarity with low cognitive demand. Based on these findings, we offer design recommendations for adaptive, family-aware in-car systems, emphasizing verbal communication, context sensitivity, and user customization.
I recently had the pleasure of speaking to the students of the Máster de Movilidad Cooperativa Conectada y Autónoma at Universidad Carlos III de Madrid, sharing how Generative AI is reshaping every corner of automated‑driving R&D. My session, “Challenges and Opportunities in Automated Driving in the Era of Agentic AI,” argued that these new AI models are far more than hype, they mark a genuine shift in the way we design, test, and ultimately will trust autonomous vehicles. Here are a few highlights from the talk content.
I started by defining what Generative AI means to me. I find that these terms are often overused, and end up meaning different things to different people. In my mind, Generative AI is a subset of Deep Learning, a group of algorithms that create new data rather than merely classify existing inputs. Whether through GANs, VAEs, diffusion pipelines, Transformers, or state‑space networks, these algorithms learn rich distributions of data representations from enormous data corpora and when trained, they become foundation models such as GPT‑n. Unlike hand‑coded software, they’re trained statistical models that approximate facets of human cognition. Based on the type of data they were trained we will have multiple “flavors” of foundation models with different capabilities.
So LLMs are not computer programs, they are “models”. Here is an analogy I like: if a computer program is like a recipe with precise steps, a model, is like having a chef who has learned to cook by tasting countless dishes and understanding flavor combinations. You can ask this “chef” to create new dishes based on this data-driven (learned) understanding, even if they haven’t seen that exact recipe before.
But LLMs are made of code. The “program” in this case is the architecture of the neural network and the learning algorithm, while the “model” is the resulting set of learned weights and biases within that network.
After getting our basis, I turned to the autonomous‑vehicle (AV) pipeline itself, where applications today cover the complete AV development stack. From simulation for realistic synthetic world generation as well as verification and validation, to perception problems, creating maps, predicting road user behaviors and new conversational AI assistants for passengers.
On simulation, I touched on solutions like Scenario Diffusion from Zoox that conjure complex, multi‑agent traffic scenes conditioned on HD maps and textual prompts, or UniSim by Waabi, which transforms mundane driving logs into editable, photorealistic worlds. These synthetic environments slash the expense and risk of road testing while letting engineers probe rare edge cases at scale.
On perception, I showcased DatasetGAN, an NVIDIA technique that simplifies manual labeling tasks and wiht a handful of labeled images spanws vast troves of perfectly segmented data.
One of the highlights on planning applicaitons is BehaviorGPT that impressed everyone with its ability to predict myriad plausible trajectories for every road user, capturing the uncertainty of traffic.
And as we get closer to the frontier of end‑to‑end decision making. DriveGPT4 shows how fused video perception with language‑model reasoning, can output low‑level control commands and natural‑language justifications for human consumption.
Of course, no talk is complete without a reality check. I emphasized the twin troubles of scarce, high‑quality multimodal data and the scary computational appetite of today’s large models. Achieving sub‑100‑millisecond latency for LLMs on in‑car hardware is no trivial feat. Security and safety are very real threats (think prompt‑injection attacks, IP leakage, nondeterministic outputs, and opaque reasoning) all of these challenge regulators and engineers alike.
Yet the opportunities are equally compelling. Model‑compression tricks like quantization, pruning, and distillation can turn bloated networks into nimble binaries, while neuromorphic chips such as Intel’s Loihi handle spike‑based inference with astonishing energy efficiency. Safety, too, can be engineered: binding language‑model suggestions inside a rigorously proven shell like Mobileye’s RSS keeps behaviors within an acceptable envelope, and tools like LVLM Interpret begin to open the model’s “black box,” offering visibility into why a recommendation was made.
I closed by reminding people that the march towards full autonomy is a marathon, but Generative AI has armed us with fresh answers to old questions. If we address data, performance, security, and safety head‑on, we can unlock a future of safer, more efficient, and more intelligent mobility. The technology is here to stay; our task now is to wield it ethically, safely, and wisely.
Thanks for reading! Contact me if you think the full content of this talk would be of interest to you or and audience of your choice.
—Prof. Ignacio Alvarez
I recently joined a fantastic panel titled “Embodied AI: Invisible Cues”, hosted by Dr Clare Mutzenich and Prof Saber Fallah at the University of Surrey, with guests from Fusion Processing, RIDC, Wayve, University of Leeds, and Waymo.
You can watch the full recording here on YouTube.
I decided to write a little reflection based on the conversation there.
Over the last two decades my research has been developing at the intersection of AI, Automotive Systems, and Human Factors across industry and academia. I see Embodied AI, particularly in the vehicle context, as a deeply socio-technical challenge. It’s not only about engineering autonomy but also ensuring that intelligent systems understand, and are understood, by people.
Over the last 2 decades, but specially in the lats 5 years, technology advancements in AI have produced “amazing algorithms” capable of processing complex data, generalizing well, and making useful predictions. This is fueling the rapid deployment of embodied AI globally today. Still traffic conditions and driving behavior have strong locality effects, driving on the German autobahn is different from driving in India, a highway in Ohio, US flows very differently than a highway in Sichuan, China.
Because of that, embodied AI requires richer context awareness:
These AI-based systems are rapidly scaling worldwide, from Tesla to German premium automakers and, more recently, Chinese OEMs. However, they are all making the same mistake. Design locally, deploy globally doesn’t work. We must design for diversity, validate for local needs, and ensure transparency to drive adoption.
Let me break it down and walk you through my logic.
We’re witnessing AI progressively replace classical vehicle-automation logic.
Although most production systems remain hybrid architectures (that’s AI plus deterministic model-based layers) the trend is clear. Companies like Waymo, Wayve and Mobileye are demonstrating how AI-centric stacks are now viable for real-world operation.
With AI, validation shifts from checking control logic to verifying embedded knowledge and its proper application.
Traditional Automotive verification and validation methods fall short. We need hybrid strategies that accurately measure how the model uses the knowledge embedded within and if any dangerous bias or sensitivityies have been introduced in the training data.
This is still an open problem but we need to combine at least:
I really like Fraunhofer’s work on safety processes (see the fig). But this is not a problem solvable by a single company. It requires collaborative efforts from the whole industry, including automakers, tier one suppliers, researchers, and government entities.
Even if the technology can be developed, making it cheap enough for mass adoption is challenging. Achieving widespread affordability requires both a supportive regulatory framework, incentives for companies to invest fully, and continued research on the area. There are many, many people working on these. But there is an angle that often doesn’t get proper attention. As AI-driven vehicles deploy globally, cultural sensitivity becomes essential.
Traffic norms, trust in automation, and interaction expectations vary dramatically across geographies. Western-trained AI won’t behave intuitively in all contexts. Neither will Asian-trained AI. In the world we live today where AI sovereignity is becoming the norm, this technology protectionism will have negative effects. In essence, Automotive AI must learn to “speak the cultural language” of its users worldwide.
Unlike digital AI, embodied AI operates in shared physical environments.
Users feel the vehicle’s motion, see its sensors, and experience its decisions.
Transparency, that means understanding why the AI acts a certain way, is needed to build comfort and trust.
A system that is legally correct but socially unfamiliar will still feel unsafe.
Clear communication of intent, authority, and decision boundaries is crucial. There are many partially answered but generally unanswered questions like:
These are not just technical questions, they are human-factors questions that to a large extend remain unanswered. They are clearly a research challenge and one that we must solve for all users, worldwide.
No single actor can solve embodied AI alone. To make progress we need cross-industry ecosystems, open frameworks, and shared validation protocols.
We must design for diversity, validate for locals, and let adoption be driven by transparency.
My proposal for this is to:
So as the mobility sector races towards AI-embodied vehicles by “sometime-sooner-than-you-think”, the invisible cues, i.e. how systems signal intent, adapt behavior, and earn user trust, will define success.
I truly believe embodied AI isn’t just about driving. It’s about communicating…
Our task as a community is to ensure that intelligent vehicles can act safely and express their intent in ways that are intuitive across cultures.
—Prof. Ignacio Alvarez
![]()
This course is designed to prepare students for their final thesis. It provides fundamental knowledge to develop a study design based on a problem definition, conduct the study, evaluate it, and interpret the results. Thematic clusters in the area of human-computer interaction (e.g., productivity, automated driving, sports, and digitalization) are offered, from which student groups can choose and propose a specific topic. This topic will be developed iteratively in close professional coordination with the respective supervising lecturers. • Basics of user studies (possible applications, definition of research hypothesis) • Study design (dependent/independent variables, laboratory vs. field studies, within-groups/between-groups design) • Planning of experiments (different methods, “fidelity” of an experiment, software/hardware prototypes, Wizard of Oz studies, qualitative surveys/quantitative measurements, ethical aspects, role of an institutional review board (IRB)) • Study implementation (preparation, briefing/debriefing, finding and inviting test subjects, determining group size, learning effects, measuring variables/data collection) • Qualitative data analysis (content analysis, evaluation with MAXQDA/NVIVO, preparation and presentation of results, revision/fine-tuning in Illustrator) • Quantitative data analysis (reflection on the research hypothesis, use of SPSS for statistical evaluations, parametric/nonparametric statistics, correct choice of method, presentation and interpretation of results) • Written/oral presentation of the results (preparation of results, peer review process, final conference-style presentation)
Recent developments highlight the growing role of automated systems in urban mobility. For example, autonomous delivery robots (ADRs), which facilitate contactless delivery, were increasingly used to support lastmile logistics during the COVID-19 pandemic. Additionally, Waymo’s robotaxis have recently completed 150,000 commercial rides and cover approximately 1.6 million kilometers per week. While these developments offer promising mobility solutions, ensuring broad public acceptance is crucial. One of the challenges currently faced is the risk of vandalism, harassment, and aggression against these systems, which can significantly impact safety, usability, and public trust. Addressing these concerns requires a proactive design approach that mitigates risks and enhances security. Within this seminar, students analyzed aspects of aggression, vandalism, harassment, and abuse directed at autonomous robots (e.g. delivery service robots, automated vehicles) with the goal to develop interfaces and technological solutions that mitigate these risks while ensuring the vehicles remain safe and functional for all users. Based on an individual literature review (related work), students (in groups of two or three) identified key challenges and explored innovative concepts. be developed together in a dedicated brainstorming session and refined/substantiated by the individual teams (with feedback from the lecturer).
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
This course is designed to prepare students for their final thesis. It provides fundamental knowledge to develop a study design based on a problem definition, conduct the study, evaluate it, and interpret the results. Thematic clusters in the area of human-computer interaction (e.g., productivity, automated driving, sports, and digitalization) are offered, from which student groups can choose and propose a specific topic. This topic will be developed iteratively in close professional coordination with the respective supervising lecturers. • Basics of user studies (possible applications, definition of research hypothesis) • Study design (dependent/independent variables, laboratory vs. field studies, within-groups/between-groups design) • Planning of experiments (different methods, “fidelity” of an experiment, software/hardware prototypes, Wizard of Oz studies, qualitative surveys/quantitative measurements, ethical aspects, role of an institutional review board (IRB)) • Study implementation (preparation, briefing/debriefing, finding and inviting test subjects, determining group size, learning effects, measuring variables/data collection) • Qualitative data analysis (content analysis, evaluation with MAXQDA/NVIVO, preparation and presentation of results, revision/fine-tuning in Illustrator) • Quantitative data analysis (reflection on the research hypothesis, use of SPSS for statistical evaluations, parametric/nonparametric statistics, correct choice of method, presentation and interpretation of results) • Written/oral presentation of the results (preparation of results, peer review process, final conference-style presentation)
Empathic in-vehicle interfaces can detect and employ a variety of intervention modalities to change user affect and improve user driving experience, for example mitigating driver distraction associated with emotional states. The emotional tone and behavior of in-cabin AI assistants can also play a significant role in shaping user experience, trust, and satisfaction. Emotional awareness in AI is critical for delivering context-appropriate responses, fostering engagement, and ensuring personalized interaction experiences. In this project, students customized AI agents to exhibit emotionally-aware behaviors that align with predefined user personas. Leveraging conversational design principles, they developed tailored conversational flows, focusing on tone, empathy, and adaptability of the AI agent. Usability testing was conducted to assess the assistant’s emotional relevance, user satisfaction, and the effectiveness of its personality in different in-car scenarios. Deliverables included a fully implemented AI assistant prototype with emotional tuned performance, using services like ChatGPT or Speechify Studio, a usability evaluation report in an Automotive UseCase, and a critical analysis of the effectiveness of emotional-aware AI in the automotive context. Students also explored ethical considerations and challenges in designing emotionally aware systems.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
Ensuring driver alertness is a cornerstone of automotive safety, and Large Language Models (LLMs) offer a unique opportunity to create intelligent systems capable of detecting and mitigating sleepiness. By integrating multimodal inputs such as audio cues, video streams, and driving context signals, LLMs can process complex, real-time data to assess driver state and trigger appropriate actions to maintain alertness. In this project, students will design and prototype an automotive agent powered by LLMs to detect and respond to driver sleepiness. The system will utilize multimodal inputs, such as facial expressions, voice tone, and driving behavior, to compute a sleepiness likelihood metric. Based on the metric and additional contextual awareness signals (e.g., time of day, driving duration), the agent will propose tailored interventions, such as adjusting cabin temperature, suggesting a rest stop, or initiating engaging conversations. Students will evaluate the system’s usability, effectiveness, and user satisfaction, exploring the interplay between AI decision-making and driver interaction.
In this course, students designed and implemented a prototype in-vehicle game that incorporated input from an AV safety model, such as an AV agent equipped with RSS in the CARLA driving simulator to provide feedback on safety-related actions. Students evaluated their designed game for usability, engagement, and its effectiveness in increasing safety awareness in driving scenarios. Deliverables included a functional game prototype, an evaluation report, and insights into the application of gamification in AV safety education.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
Educating vehicle passengers and drivers about safety in autonomous vehicles (AVs) can be a challenge, especially when technical concepts like the Responsibility Sensitive Safety (RSS) model are involved. Gamification offers an innovative way to enhance user engagement and increase awareness of AV safety principles through the more natural interfaces of games by transforming complex concepts into interactive and enjoyable experiences. Integrating a safety model like RSS into a game can provide users with real-time feedback on safe driving practices and decision-making in various scenarios, as well as improve overall situational awareness during non-driving tasks.
In this course, students designed and implemented a prototype in-vehicle game that incorporated input from an AV safety model, such as an AV agent equipped with RSS in the CARLA driving simulator to provide feedback on safety-related actions. Students evaluated their designed game for usability, engagement, and its effectiveness in increasing safety awareness in driving scenarios. Deliverables included a functional game prototype, an evaluation report, and insights into the application of gamification in AV safety education.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.
![]()
This course provides a practical introduction to the integration of generative AI and “vibe coding” into UX work-flows. Students will: • Explore foundational concepts of Generative AI, focusing on LLMs. • Learn techniques of prompt engineering to effectively direct AI tools. • Apply AI-driven methods to enhance UX research processes, from data collection to synthesis and prototyping. • Utilize AI-assisted development platforms, such as ChatGPT, Replit or Cursor, to prototype interactive user interfaces, tools and applications. • Investigate the emerging paradigm of Agentic AI and its potential to autonomously resolve user experience challenges. • Undertake a comprehensive final project, culminating in designing, building, and deploying a specialized AI agent addressing a defined UX issue.
Coming soon
Contact me if you’d like me to teach this course to you or your audience.